毫米波雷达在ADAS中应用
2018-07-18 17:31:45 来源:麦姆斯咨询 评论:0 点击:
在上一篇《认识毫米波雷达》中,麦姆斯咨询介绍了毫米波雷达的基本概念,提到毫米波雷达作为一种能够全天候全天时工作的汽车周围环境感测部件,是高级辅助驾驶系统(ADAS)中不可或缺的传感器。今天,我们就来聊一聊ADAS,看看毫米波雷达是如何在其中发挥重要作用的!
在上一篇《认识毫米波雷达》中,麦姆斯咨询介绍了毫米波雷达的基本概念,提到毫米波雷达作为一种能够全天候全天时工作的汽车周围环境感测部件,是高级辅助驾驶系统(ADAS)中不可或缺的传感器。今天,我们就来聊一聊ADAS,看看毫米波雷达是如何在其中发挥重要作用的!
ADAS普及率迅速提升,为安全出行“保驾护航”
每年全球范围都有上百万人在交通事故中丧生,受伤者更是高达千万,据调查研究显示,90%的交通事故都是因驾驶员操作失误而引起,因此各个国家都很重视如何去降低事故频率、减轻事故伤害;而ADAS作为前沿的主动安全技术,可以有效减少或减缓交通事故,显著改善道路交通安全状况。因此,美国、欧盟、日本等国相继出台法律要求强制安装某些通过了安全验证的驾驶辅助技术,我国也在2018年将自动紧急制动系统(AEBS)纳入新车评价规程(NCAP)评分体系。而从消费者的角度出发,为了自身和乘客的安全,也越来越倾向于选择这样一个“沉默”而主动的帮手来“保驾护航”。
ADAS的普及率迅速提升,而作为其核心的毫米波雷达需求也相应水涨船高。据麦姆斯咨询报道,2016年全球毫米波雷达的出货量较上年同期增长27.5%,达到3150万个。预计2021年,全球毫米波雷达的出货量将达到8400万个,2016~2021年之间的复合年增长率为21.7%。预计2021年全球毫米波雷达市场规模将达到60亿美元。
“短程+中程+长程”毫米波雷达,全方位“呵护”汽车驾驶
常见的车载毫米波雷达按工作频率主要有24GHz和77GHz,根据其探测距离范围又可分为:短程毫米波雷达SRR(60米以下)、中程毫米波雷达MRR(100米左右)、长程毫米波雷达LRR(200米以上)。不同频段的毫米波雷达在ADAS中的应用情况请见表1。
表1 毫米波雷达分类及功能

根据波的传播理论,频率越高,波长越短,分辨率越高,探测距离越远,但探测角度(水平视场)会变小。所以77GHz毫米波雷达较24GHz可以实现更远的探测距离,精度更高,不过随着频率的增加相应的芯片的设计和制造难度也变大,77GHz成本更高。通常探测角度和探测距离是矛盾的。如图1,显示了大陆集团77GHz ARS 310型毫米波雷达在短、中、长程不同探测距离和探测角度的比较。所以虽然说77GHz功能上可以取代24GHz,是未来主流,但从性价比的角度来看,目前短程雷达还主要由24GHz承担。
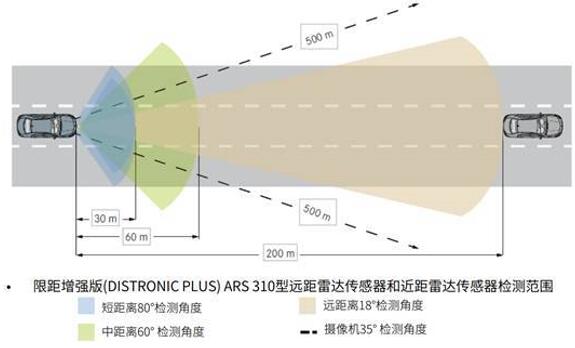
图1 大陆集团ARS 310型的短程、中程、长程雷达检测范围
想要完全实现ADAS各项功能,全方位覆盖汽车周围环境的感测,兼顾性能和成本,一辆汽车上会安装多颗短程、中程和长程毫米波雷达。不同的毫米波雷达“各司其职”,在车辆前方、车身和后方发挥不同的作用。目前主要的标配:1-2颗77GHz MRR/LRR+4颗24GHz SRR。24GHz SRR虽然探测距离相对较短,但优势在于探测角度较大,成本相对较低,可以配置多颗实现车身近距离全方位覆盖。MRR/LRR功能相当,LRR的优势在于它的可探测距离比较远,适用速度能达到250km/h,但在绝大部分有限速的国家,使用成本相对更低且适用速度在160km/h内的中距雷达来实现自适应巡航(ACC)功能更划算。
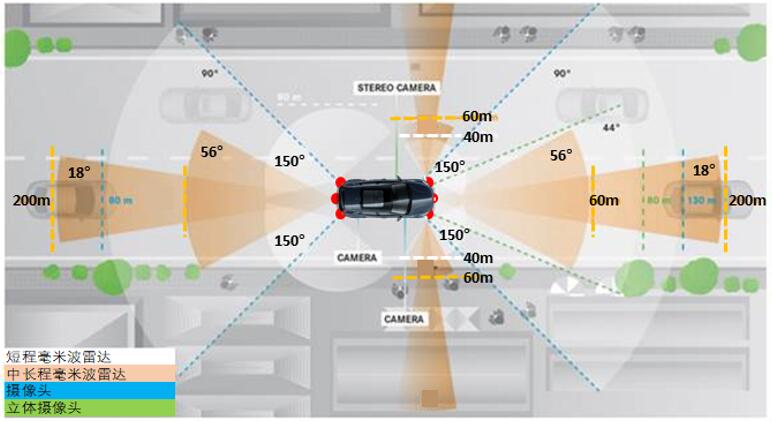
图2 奔驰S级雷达(1长+1中+4短)覆盖距离范围示意图
例如,奔驰S级就采用6颗毫米波雷达(1长+1中+4短),如图2,分别分布在前向双模长程毫米波雷达1颗,后向中远程毫米波雷达1颗,前/后保险杠左右短程雷达共4颗。“短程+中程+长程”毫米波雷达三者结合一起共同完成自适应巡航(ACC)、自动紧急制动(AEB)、前方/后方碰撞预警(FCW/BCW)、变道辅助(LCA)、盲点检测(BSD)、倒车辅助(BPA)、泊车辅助(PA)等多种ADAS功能。其中ACC、AEB、FCW、LCA作为汽车ADAS中最主要的防撞预警功能,是如何实现的?下面将详细介绍。
自适应巡航(ACC)
自适应巡航(Adaptive Cruise Control,ACC),是一种可以依据设定的车速或者距离跟随前方车辆行驶,或根据前车速度主动控制本车行驶速度,最终将车辆与前车保持在安全距离的驾驶辅助功能,该功能最大的优点是可以有效的解放驾驶者的双脚,提高驾驶的舒适性。
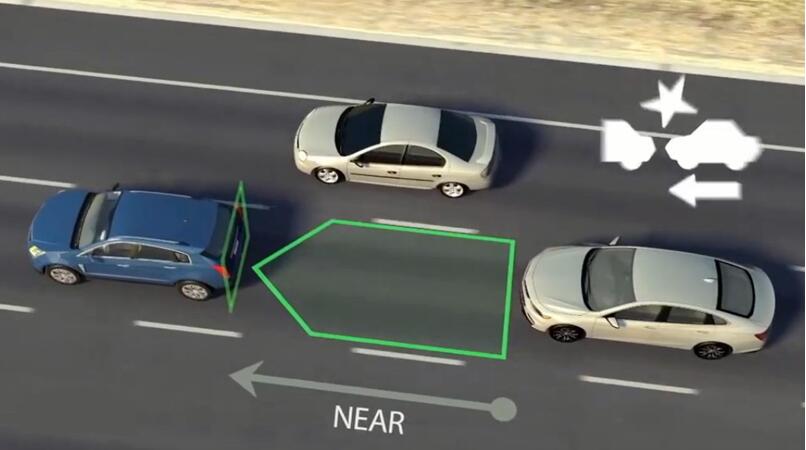
图3 自适应巡航
ACC的实现原理:在车辆行驶过程中,安装在车辆前部的毫米波雷达传感器持续扫描车辆前方道路,同时轮速传感器采集车速信号。当与前车之间的距离过小时,ACC系统可以通过与制动防抱死系统、发动机控制系统协调动作,使车轮适当制动,并使发动机的输出功率下降,以使车辆与前方车辆始终保持安全距离。ACC系统在控制车辆制动时,通常会将制动减速限制在不影响舒适度的程度,当需要更大的减速时,ACC系统会发出声、光预警信号通知驾驶者主动采取制动操作。
自动紧急制动(AEB)
自动紧急制动(Autonomous Emergency Braking,AEB),是一种汽车主动安全辅助功能。AEB系统利用毫米波雷达测出与前车或者障碍物的距离,然后利用数据分析模块将测出的距离与警报距离、安全距离进行比较,小于警报距离时就进行警报提示,而小于安全距离时即使在驾驶员没有来得及踩制动踏板的情况下,AEB系统也会启动,使汽车自动制动,从而确保驾驶安全。

图4 自动紧急制动
据研究表明,90%的交通事故是由于驾驶者的注意力不集中而引起的,AEB技术能在现实世界中减少38%的追尾碰撞,且无论是在城市道路(限速60km/h)或郊区道路行驶的情况下,效果都显著。所以,欧洲新车安全评鉴协会(Euro NCAP)在2014年率先将AEB系统纳入整体安全评级中,而我国也在2018年将AEB加入了NCAP评分体系。
前方防撞预警功能(FCW)
前方防撞预警(Forward Collision Warning,FCW),通过毫米波雷达和前置摄像头不断监测前方的车辆,判断本车与前车之间的距离、方位及相对速度,探测到前方潜在的碰撞危险,当驾驶员没有采取制动措施时,仪表会显示报警信息并伴随声音报警,警告驾驶员务必采取应对措施。当判断到事故即将发生时,系统会让刹车自动介入工作,从而避免事故发生或降低事故可能造成的风险。
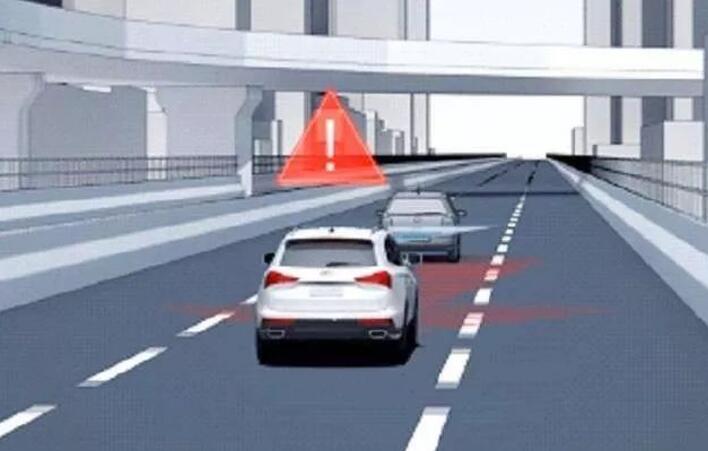
图5 前方防撞预警
AEB通过传感器探测前方的车辆、行人等障碍物,如果发现距离过近且存在碰撞风险时,进行自动制动。FCW则可以理解为进行自动制动之前的预警功能。其实,FCW和AEB系统是相辅相成的关系,目的都是在行车时避免或减少碰撞事故的发生。
变道辅助(LCA)
变道辅助(lane change assist,LCA),是通过毫米波雷达、摄像头等传感器,对车辆相邻两侧车道及后方进行探测,获取车辆侧方及后方物体的运动信息,并结合当前车辆的状态进行判断,最终以声、光等方式提醒驾驶员,让驾驶员掌握最佳变道时机,防止变道引发的交通事故,同时对后方碰撞也有比较好的预防作用。
变道辅助系统包括“盲点检测(BSD)”、“变道预警(LCA)”、“后碰预警(RCW)”3个功能。可以有效地防止变道、转弯、后方追尾等交通事故的发生,极大提升汽车变道操作的安全性能。
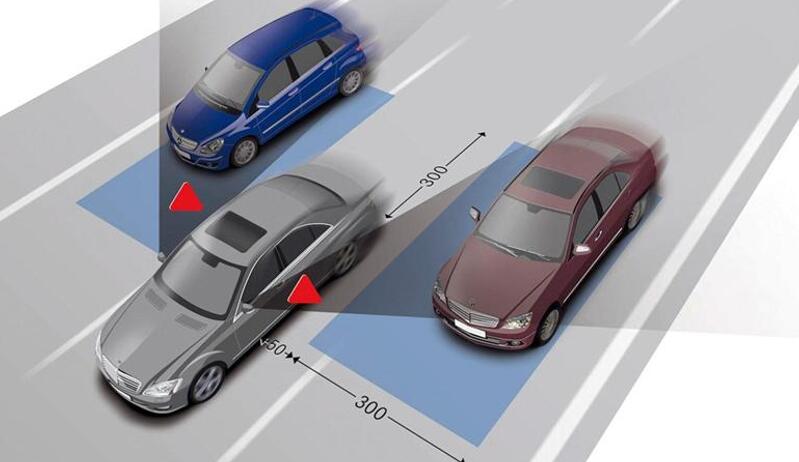
图6 变道辅助
其中,BSD根据其判断的移动物体所处的相对位置及与本车的相对速度,当处于本车的盲区范围内,及时提醒驾驶员注意变道出现的风险。LCA检测目标车辆在相邻的区域以较大的相对速度靠近本车,在两车时距小于一定范围内时,通过声、光等方式提醒驾驶员。RCW检测到同一车道后方有快速接近的移动物体,并有碰撞风险时,及时通过声、光等方式,预警驾驶员系好安全带等方式减小碰撞带来的伤害。
多种传感器融合
其实在这些驾驶辅助功能实现的过程中,我们不难发现虽然毫米波雷达起到了最核心的物体探测、测距和测速的作用,但是整个过程还需要其它传感器的辅助,比如激光雷达、摄像头、超声波雷达、惯性传感器等。随着越来越多汽车厂商开始将不同的传感器整合到汽车ADAS中,业界普遍认为“传感器融合(sensor fusion)”是高度自动化驾驶安全性的关键。
在环境感知中,每一种传感器都有独特的优势和弱点。例如,毫米波雷达不受天气影响可全天候全天时工作,但分辨率不高,不能区分人和物;而摄像头有更高的分辨率,能够感知颜色,但受强光影响较大;激光雷达则能够提供三维尺度感知信息,对环境的重构能力强,但受天气影响大。传感器各有优劣,难以互相替代,未来要实现自动驾驶,是一定需要多种传感器相互配合共同构成汽车的感知系统。如图7,随着自动驾驶从L2级朝L5级自动驾驶发展,集成在汽车上传感器数量和种类不断增加,只有这样才能够保证信息获取充分且有冗余,才能达到OEM主机厂所需的安全标准。
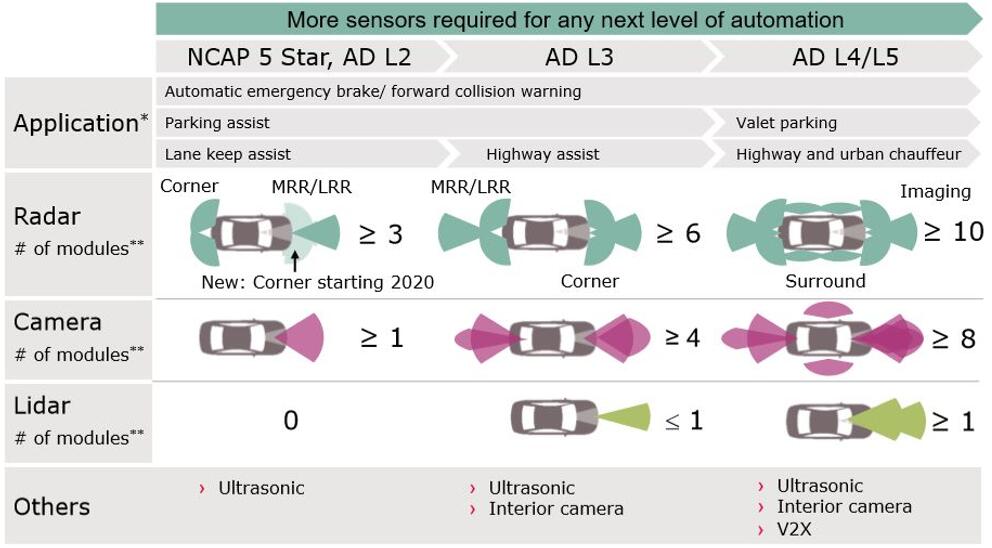
图7 不同自动驾驶阶段对各种传感器的需求
软件是多种传感器融合的核心之一。算法是多传感器融合通往更高级自动驾驶技术的“拦路虎”,因为多种传感器的使用会使需要处理的信息量大增,这其中甚至有相互矛盾的信息,如何保证系统快速地处理数据,过滤无用、错误信息,从而保证系统最终做出及时正确的决策十分关键。目前多种传感器融合的理论方法有贝叶斯准则法、卡尔曼滤波法、D-S证据理论法、模糊集理论法、人工神经网络法等。
因此,在使用多种传感器的情况下,要想保证安全性,就必须对传感器进行信息融合。多传感器融合可显著提高系统的冗余度和容错性,从而保证决策的快速性和正确性,是现阶段ADAS走向高级自动驾驶并最终实现无人驾驶的必然趋势。
推荐会议:
2018年9月6日,麦姆斯咨询将在深圳会展中心举办『“微言大义”研讨会:毫米波雷达技术及应用』(同期展会:第二十届中国国际光电博览会)。目前已邀请到亚德诺半导体(ADI)、意法半导体(ST)、清能华波、矽杰微电子、意行半导体、中国电子科技集团公司58所、美国国家仪器、生益科技、行易道科技、豪米波技术等公司演讲,拟邀请英飞凌(Infineon)、恩智浦(NXP)、德州仪器(TI)、博世(Bosch)、法雷奥(Valeo)、大陆集团(Continental)、奥托立夫(Autoliv)、德尔福(Delphi)、加特兰微电子、华域汽车、隼眼科技、森思泰克、行易道、智波科技、纳雷科技、木牛科技等公司参加。
如果您要参加演讲或进行产品展示,详情请联系会议招商组:
联系人:肖莉
邮箱:XiaoLi@MEMSConsulting.com
电话:18861567166
官网:http://www.memseminar.com/23/
延伸阅读:
《德州仪器77和79GHz单芯片汽车雷达传感器:AWR1642》
《英飞凌76GHz雷达接收和发射芯片:RRN7740 & RTN7750》
《恩智浦MR2001多通道77GHz雷达RxTxVCO扇出RCP芯片组》