这种带有传感器的皮肤,可以让机器人拥有像人类一样灵敏的触觉
2017-10-22 17:46:51 来源:微迷 评论:0 点击:
现在,来自华盛顿大学和加州大学洛杉矶分校的工程师们,发明了一种带有传感器的“皮肤”,可以覆盖机器人的身体或假肢的任何部位,具备可延展可拉伸的性能,可以准确地感知关于剪切力和振动的信息。而这些信息对于成功地抓住和操纵物体至关重要。
我们知道机器人可以在仓库里自动搬运,借助人工智能还可以战胜国际象棋大师,可以驾驶汽车,在众多方面都赶超了人类。但是触觉是一种极为细腻的感觉,机器人在这方面做得并不理想。
比如,一个机器人要去拆解路边的炸弹,或者在给你做煎蛋的时候怎么小心地处理一个鸡蛋,这个时候,它就需要能准确地感应到,什么时候物体正在脱离它的控制。
迄今为止,大多数机器臂和假肢的手,都很难准确地感知到发生的振动和剪切力(一个力学名词,“剪切”是在一对相距很近、大小相同、指向相反的横向外力(即垂直于作用面的力)作用下,材料的横截面沿该外力作用方向发生的相对错动变形现象),例如,当手指在桌面上滑动,或物体开始下落的时候。
现在,来自华盛顿大学和加州大学洛杉矶分校的工程师们,发明了一种带有传感器的“皮肤”,可以覆盖机器人的身体或假肢的任何部位,具备可延展可拉伸的性能,可以准确地感知关于剪切力和振动的信息。而这些信息对于成功地抓住和操纵物体至关重要。
论文中描述的这种皮肤,模拟了人的手指在滑过表面或在区分不同的纹理时产生的拉伸和压缩。它能够敏锐地感知到这些触觉信息,并达到和人类相似的精确度和灵敏度。这种能力可以大大提高机器人在多个领域的能力,从外科手术、工业流程到清洁厨房等等。
该论文的主要作者、机械工程和化学工程教授Jonathan Posner表示,现在机器臂和假肢手都是通过视觉信息来判断的,比如机器人通过视觉辨别”我的手是握在这个物体上吗?“或者”我的手是在摸着这根线吗?“这显然不太完整。
从日常经验可以得知,我们的视觉可以看到一个物体的全貌,但是在触摸它的过程中,我们的手会感受到一些新的信息,比如它细部的纹理、材质的柔软度等等,这是视觉很难获得的信息。
据Posner介绍,如果一个机器人要拆除一个简易爆破装置,就需要知道它的手在沿着导线滑动还是在拉着导线,如果机器人手里拿着医疗器械,它需要指导手中的物体是否在滑动。而这都需要机器人有能力感知剪切力。目前,其他的传感器皮肤还没有这种能力。

我们来看下它的工作原理:
这种新型的可拉伸的电子皮肤,由华盛顿大学的华盛顿纳米实验室制造的。它是用在游泳镜中使用的硅橡胶制成的。橡胶内含细小的蛇形通道——大约是人类头发宽度的一半——充满了导电的液态金属。当皮肤被拉伸时,这种液态金属不会开裂或疲劳,就像固定的电线一样。
当电子皮肤被放置在一个机器人手指或末端执行器上时,这些微流体通道会被放置在它手指的两侧,相当于人类指甲两侧的位置。
当你的手指在物体的表面滑动时,你的指甲的一侧会突出,而另一侧则会因为压力而变得紧绷。
同样的事情也会发生在机器人或假肢手上——在“指甲”一侧的微流体通道被压缩,而另一侧则会伸出来。
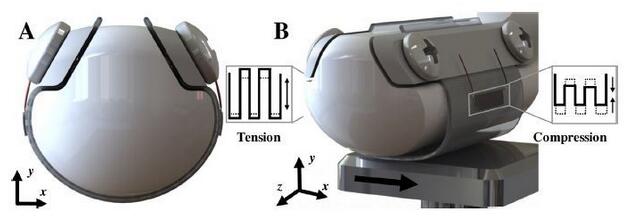
当通道的几何形状发生变化时,能通过的电流也会随之改变。研究小组可以测量这些不同的电阻,并将它们与机器人手指,所经历的剪切力和振动联系起来。
然后,机器人的手就可以模拟人类的触觉了。
研究小组已经证明了这种带有传感器的皮肤,在面对轻微触碰时有着很高的精确度和灵敏度,比如,打开一扇门,与手机交互、握手、拿起包、触摸一些物体,等等。
最近的实验表明,这种皮肤能够检测到每秒800次的微小振动,比人类的手指还好使。
因此,Posner说:“通过在一个灵活的电子皮肤上模仿人类的生理机能,我们已经达到了与人类的手一致的灵敏度和精确度,这是一个重要的突破。”
虽然,机器人离拥有人类一样细腻的触觉还有很远,但这无疑是让人欣喜的一步。无论机器人有多么强大的视觉和计算能力,还是会让人觉得机器人就是机器,但是当它拥有细腻的触觉后,就更像一个有血有肉的人了。
一个视觉灵敏、智力强大的机器人,你看着它方头方脑的样子,总觉得它像一个“你瞅啥瞅你咋地”的愣头青。可是有了触觉就不一样了,你就可以跟它相互调戏了,说不定它都能摸出你脸上有几个坑。
延伸阅读: