松下推出广视角3D LiDAR传感器
2017-09-12 22:49:00 来源:麦姆斯咨询 评论:0 点击:
据麦姆斯咨询报道,Panasonic(松下)近日宣布开发出了一款3D(三维)LiDAR(激光雷达)距离传感器,它能够广视角精确测量周围物体的距离和方向,是自动机器人运行的关键组件。

据麦姆斯咨询报道,Panasonic(松下)近日宣布开发出了一款3D(三维)LiDAR(激光雷达)距离传感器,它能够广视角精确测量周围物体的距离和方向,是自动机器人运行的关键组件。该3D LiDAR采用了松下独有的激光扫描技术,实现了垂直方向60度、水平方向270度的广角扫描,为自动机器人的稳定运行提供了保障。松下将在2017年10月3~6日举办的日本高新技术博览会(CEATEC JAPAN 2017)展示这款3D LiDAR。
据麦姆斯咨询介绍,这款广视角3D LiDAR,能够精确探测路面上的障碍物以及路面的起伏。此外,还可以通过调整系统中反射镜的旋转角度和速度,精确调整3D LiDAR的扫描角度和分辨率。因而用户可以根据应用场景,精确而灵活的选择合适的探测状态。这将助推自动机器人在障碍物环绕、人来人往的室内外环境中的广泛普及。
这款广视角3D LiDAR的产品特点:
- 实现广视角的三维距离和方向探测,垂直方向60度、水平方向270度;
- 可进行垂直方向扫描角度、分辨率的任意设定;
- 即使在强烈日照环境下也可进行高精度探测。
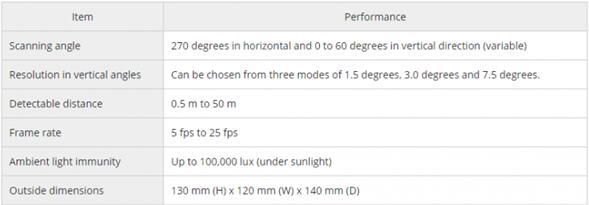
松下3D LiDAR的基本参数
自动机器人要在障碍物环绕、人来人往的室内外环境中稳定运行,需要能够探测周围的地面环境以及障碍物情况。传统的专为自动驾驶汽车设计的LiDAR无法在垂直方向进行大范围扫描。因此,它们无法精确探测路面状况。为此,传统LiDAR需要结合其它传感器才能探测路面状况,使得自动运行机器人的架构和设计变得非常复杂。
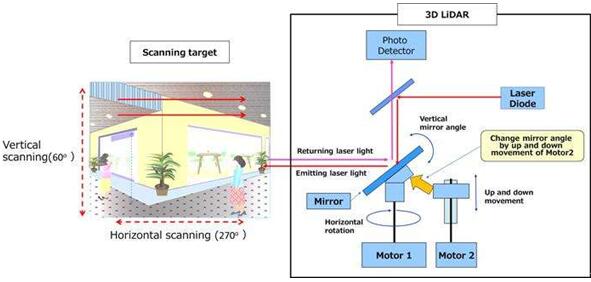
松下3D LiDAR激光扫描系统的结构图
广视角:垂直方向60度、水平方向270度
现有的LiDAR传感器无法实现广视角的周围障碍物探测,尤其是垂直方向。松下开发的激光扫描技术,采用了其在大规模生产光碟驱动中开发积累的独有的光学系统设计和反射镜马达控制技术。这款3D LiDAR采用了一个激光器和运动反射镜来实现探测。反射镜通过两个驱动马达,实现在两个不同方向上的运动。单光路设计和反射镜运动的广角度,实现了垂直方向60度、水平方向270度的广视场角。这款3D LiDAR不需要任何额外传感器,便能探测周围的障碍物及路面状况,大大简化了自动机器人的探测系统。
垂直方向视角和分辨率的任意设定
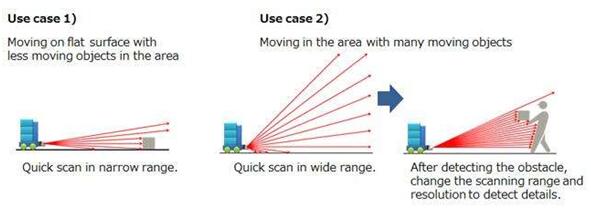
松下3D LiDAR激光扫描案例
自动机器人时常需要在特定的区域内运行,探测周围的障碍物。例如,当它们在非常平坦且障碍物很少的区域运行时,它们不需要非常精确的探测路面的起伏或周围的障碍物。障碍物探测传感器,可以根据机器人的运行速度调节,进行相对高速的探测扫描。另一方面,当机器人在人来人往或障碍物较多的区域行驶时,它又需要广视角的精确感知能力。此外,3D LiDAR还需要对被测障碍物的表面进行详细探测。松下新开发的3D LiDAR得益于独有的激光扫描技术,可以轻松的调整探测设置。根据机器人的运行环境,选择最合适的探测设定,可以使机器人获得最稳定、最高效的运行状态。
强日照下的精确探测
在强烈的日照环境下,自动机器人也需要精确地探测障碍物。松下通过使反射光和发射光处于同一光路,成功地降低了由日照带来的噪声。使其新开发的3D LiDAR能够在盛夏10万勒克斯的照度下,也能实现精确探测。
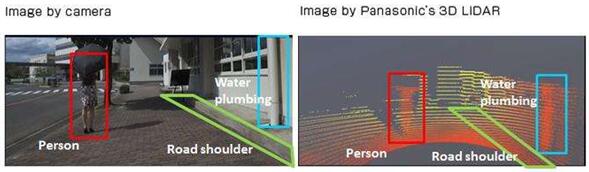
强日照下的探测样图
推荐会议:
2017年12月22日,由麦姆斯咨询主办的『“微言大义”研讨会:激光雷达技术及应用』将在深圳会展中心隆重举行(同期展会:2017年深圳国际电子展)。本次研讨会内容涉及激光雷达应用及市场分析、激光雷达原理及技术路线、 激光雷达模组剖析及算法解析等。已邀请ams、禾赛科技、速腾聚创、镭神智能、西安知微传感、滨松等企业进行演讲,如果贵司希望参加会议,请联系:
联系人:王懿
邮箱:WangYi@MEMSConsulting.com
电话:17898818163
延伸阅读:
《LeddarTech固态激光雷达(LiDAR)模组:LeddarVu》
《自动驾驶汽车中的传感器和数据管理》
上一篇:3D人脸识别技术蓄势待发
下一篇:鞋底传感器可保护人们在提重物时免受背部损伤