昔日导航“心脏”已成为智能生活的明日之星:惯性测量单元(IMU)
2017-10-14 21:39:36 来源:麦姆斯咨询 评论:0 点击:
IMU,Inertial Measurement Unit,即惯性测量单元。如今IMU已不仅限于专业导航中使用,其应用范围涉猎广泛:远至军事防御、航空航天、海事等领域,近至日常的微信定位、智能手机、汽车 火车、无人驾驶、智能家居等方面均会使用。
IMU,Inertial Measurement Unit,即惯性测量单元。如今IMU已不仅限于专业导航中使用,其应用范围涉猎广泛:远至军事防御、航空航天、海事等领域,近至日常的微信定位、智能手机、汽车/火车、无人驾驶、智能家居等方面均会使用。
MEMS-IMU发展之路“前途广阔”
基于传统惯性器件的特点,将MEMS与之结合可极大地改善传统惯性器件的缺点。MEMS是将微电子技术和机械工程融合到一起的工业技术,伴随着制作集成电路的硅半导体工艺的完善,20世纪80年代出现的微型机械、微型传感器和微型执行器的微机械制造技术,使得MEMS技术成为现实产品,满足不同需求的应用领域。根据对MEMS-IMU精度要求不同,大概可将其分为低精度、中精度和高精度三类。
(1)低精度MEMS-IMU
应美盛(InvenSense)旗下的 ICM-20602 6轴惯性传感器(3轴加速度计 + 3轴陀螺仪)全面支持谷歌 Daydream 和 Tango 的要求,可批量生产应用于 Daydream 认证和兼容Tango的智能手机,以构建的 VR/AR 生态系统。这便是低精度MEMS-IMU应用的一个成功案例。总结来看低精度MEMS-IMU主要用于消费电子类的产品,其应用范围极为广泛,可用于手机、游戏机、音乐播放器、无线鼠标、数码相机、硬盘保护器、智能玩具、计步器、防盗系统等。与环境传感器等器件结合,可实现助听、运动感测等功能。这类低精度的MEMS-IMU主要要求是:单价低、尺寸小、温度范围窄。

应美盛ICM-20602 6轴惯性传感器
低精度MEMS-IMU:加速度计尺寸小、重量轻、功耗低,一般测量范围1~50g,分辨率2mg~10mg,陀螺仪一般量程在±300°/s,零偏在500°/h~1000°/h范围内。
(2)中精度MEMS-IMU
相比低精度MEMS-IMU,中精度MEMS-IMU主要用于汽车级及工业级产品。
在汽车级产品中,中精度MEMS-IMU不仅可用于GPS 辅助导航系统,而其对于车电子稳定系统、汽车安全气囊、车辆姿态测量也有奇效。例如IMU可以用作高精度定位、汽车自身姿态的判断,即使在GPS信号丢失或有阻隔的情形中,IMU也可为汽车提供可靠的信息,这便可确保汽车主动安全,是自动驾驶的关键组件之一。再比如,近些年汽车车身稳定系统的标配ESP中,IMU就是其中的关键组件。汽车级可作为一个工业应用的特殊产品,对其可靠性要求高,同时由于需求数量大,和一般工业要求不同的是要求单价低。
在工业级产品中,中精度MEMS-IMU可应用于精密农业、工业自动化、大型医疗设备、机器人、仪器仪表、工程机械等。还记得,Atlas高端类人机器人惊人的平衡感吗?那个摔倒了还可以自己爬起来的神奇机器人,其超强的平衡感要部分归功于其体内的IMU。说起在工业领域使用的惯性传感器,大多以模块形式出现,对于应用于工业级芯片级产品,还必须进行处理,包括软件和硬件电路,以及对不同工业环境的适应性,大多数要求价格适中,精度要求要优于应用于消费电子类的传感器。

Atlas高端类人机器人
中精度MEMS-IMU:加速度计的量程选择比较宽1~500g,分辨率1mg~3mg,陀螺仪量程大多250°/s以内,零偏在50°/h~200°/h范围内。
(3)高精度MEMS-IMU
高精度IMU可解决复杂航空航天系统中惯性传感器的部署难题,如航空电子系统所采用的IMU是ADIS16485/8,满足一切性能和可靠性目标。高精度MEMS-IMU主要用于军用级和宇航级产品,要求高精度、全温区、抗冲击等。主要应用于通讯卫星无线、导弹导引头、光学瞄准系统等稳定性应用、飞机和导弹飞行控制、姿态控制、偏航阻尼等控制应用、以及中程导弹制导、惯性GPS导航等制导应用、远程飞行器、船舶仪器、战场机器人等。军工级或宇航级的MEMS-IMU精度要求高、工作温度范围宽,某些兵器产品要求抗冲击能力强,尺寸要比光纤和机械类产品更小。

ADIS16488惯性测量单元
高精度MEMS-IMU:加速度计量程范围比较宽1g~5000g,分辨率要0.1mg~1mg范围内,甚至更高。陀螺仪量程要求范围宽20°/s~1000°/s,频率响应高,要求在50Hz~1000Hz之间,零偏稳定性在1°/h~50°/h范围内。
如今MEMS-IMU正在向更高集成度和更高精度的方向发展。其中MEMS陀螺仪的发展极为明显,其性能也在接近或者已经达到战术级应用的水平;而MEMS加速度计是商业市场化最为成功的,其精度已经能够满足战略导弹的应用要求,但目前MEMS加速度计的精度水平还不是很高。MEMS惯性器件在结构设计、制作工艺、集成化、电路设计、封装及试验系统等方面还存在许多的问题,需要进一步解决。MEMS惯性传感器的研究热点和发展方向是精度高、环境适应能力强和多传感器集成化等,其中MEMS惯性传感器件的设计和制造元器件所需的生产工具也是一个重要的研究方向。
IMU简介
IMU,惯性测量单元,是一种使用加速度计和陀螺仪来测量物体三轴姿态角(或角速率)以及加速度的装置。狭义上,一个IMU 内在正交的三轴上安装陀螺仪和加速度计,共 6 个自由度,来测量物体在三维空间中的角速度和加速度,这就是我们熟知的“6轴IMU”;广义上,IMU可在加速度计和陀螺仪的基础上加入磁力计,可形成如今已被大众知晓的“9轴IMU”。
其中加速度计检测物体在载体坐标系统独立三轴的加速度信号,而陀螺仪检测载体相对于导航坐标系的角速度信号,测量物体在三维空间中的角速度和加速度,并以此解算出物体的姿态。IMU在导航中的核心价值无可替代,为了提高其可靠性,还可以为每个单轴配备更多种类的传感器。为保证测量准确性,一般IMU要安装在被测物体的重心上。
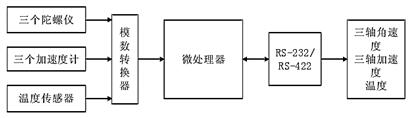
一种IMU原理示意图
影响IMU性能的主要因素
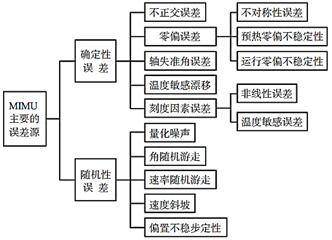
MEMS-IMU主要误差源
将IMU的误差源归类后主要有以下四类:
(1)加速度计影响因素
在IMU中,加速度计对其的影响主要体现在加速度计的精度和稳定性两个方面。其中加速度计的高精度是为保障后续数据处理的精确性,加速度计的稳定性则是直接影响IMU能否发挥出正常性能的关键因素。
其中加速度计精度可采用6位置静态标定法。将IMU器件安装完毕后,按照下图的六个位置分别收集三个方向加速度计的数据。
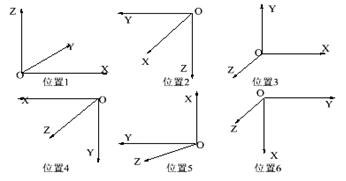
加速度计静态六位置
(2)陀螺仪影响因素
陀螺仪对IMU的影响主要体现在其精确性上,其精确性将直接影响姿态解算的优劣程度,换句话说,最后IMU能否正确感知产品的姿态就是依靠陀螺仪的精确性。
陀螺仪误差模型与加速度计类似,采用的标定方法是动态旋转的,将IMU置于单轴转台中,令每个轴向上、向下,并分别以50°/s、100°/s、150°/s、200°/s、250°/s的转速转动正反方向,并收集足够的数据。

陀螺仪的动态标定
除精确性外,MEMS陀螺的性能指标主要有:标度因数(与比例因子互为倒数)、标度因数非线性、零偏、零偏稳定性、零偏重复性。这些指标系统的反映了陀螺仪的性能,因此有必要对其进行相应的测试,掌握其具体的指标参数。
(3)温度影响因素
MEMS惯性器件在温度发生变化时,其精度会产生较大的差异,一般情况下,惯性器件的工作环境不可能是恒温环境,尤其是陀螺的精度受到严重影响,因此温度的影响不能忽略,以陀螺仪为例,置放惯性器件于恒温转台中试验,并在不同温度下收集数据。

微惯性器件的温度试验
(4)IMU产品化后主要影响因素
A.信噪比低
信噪比低会造成使用IMU的产品不敏感,因此最棘手的问题便是降噪。一般此种情况可利用小波降噪,对信号进行消噪实际上是抑制信号中的无用部分,增强信号中的有用部分的过程。
惯性器件常用的消噪过程为:a. 信号的小波分解,选择一个合适的小波并确定分解的层次,然后进行分解计算;b. 小波分解高频系数的阈值量化,对各个分解尺度下的高频系数选择一个阈值进行软阈值量化处理;c. 小波重构,根据小波分解的最底层低频系数和各层分解的高频系数进行一维小波重构。其中最关键的是如何选择阈值以及进行阈值量化处理,它直接关系信号消噪的质量。
B.漂移大/延迟大
对于信号延迟问题,MEMS的常用器件都有存在,在IMU产品中极为明显。国外研究机构提出利用惯性误差旋转调制技术,来解决延迟问题。惯性误差旋转调制技术实质上是一种误差自补偿技术,利用IMU周期性转动完成对惯性器件慢变误差的调制,是在现有器件精度的条件下实现更高导航精度的有效方法。采用误差调制技术的惯性导航系统结构发生了变化,旋转机构的存在导致陀螺仪和加速度计与载体不再固连,但解算依然采用捷联算法,因此这种惯性导航系统被称为旋转调制型捷联惯性导航系统。
延伸阅读:
《mCube晶圆级芯片封装(WLCSP)MEMS加速度计:MC3672》