Oryx Vision公司采用纳米天线技术实现创新的深度视觉解决方案
2017-02-05 13:43:08 来源:麦姆斯咨询 评论:0 点击:
Oryx的激光器使用的是长波太赫兹红外激光,因为这种红外光人眼不可见,所以Oryx可以在其相干光雷达系统上使用比激光雷达更高的功率。而这种红外光还很难被水吸收,这意味着Oryx的相干光雷达不会像激光雷达和摄像机那样被云雾、强烈的阳光直射所干扰。
公司背景
基于创新的深度传感技术,Oryx Vision为自动驾驶汽车开发了一种创新的深度视觉解决方案,它是目前满足自动驾驶汽车对感知范围和灵敏度要求的唯一解决方案。
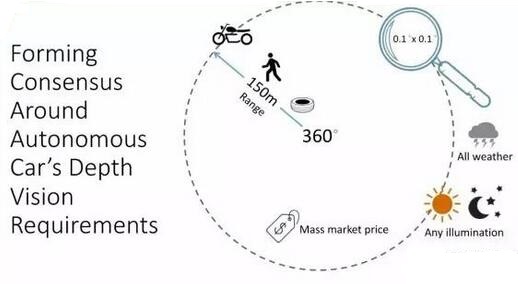
为了实现真正的自动驾驶,自动驾驶汽车需要极高的视觉感知能力。Oryx的深度传感器可以检测到150米远的微小物体,它既可以在暗夜里工作,也不会受直射的阳光影响,而即使在雨雾等极端天气条件下也可以稳定工作。Oryx传感器可以无缝集成到车辆的四周,一组这样的传感器不但可以提供360°范围的高性能的景深探测覆盖,而且价格低廉。
解决需求
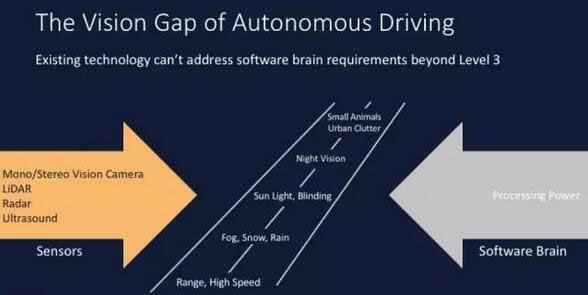
为了实现自动驾驶,车辆的视觉感知能力必须达到很高的水平,譬如必须能够识别80米外沥青路面上的轮胎碎片,或者前方150米处正横穿马路的摩托车,除此之外,还必须能够在漆黑的午夜或正午耀目的阳光直射等极端的环境下正常工作。
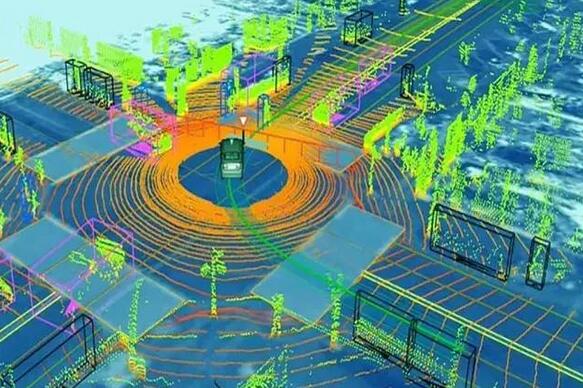
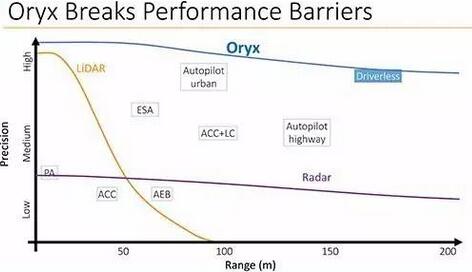
目前的车载雷达技术的感知范围可以达到150到200米,但分辨率十分有限。激光雷达是目前自动驾驶汽车正在采用的技术,其利用在车顶上安装的光电感应器建立其周围世界的3D图像。激光雷达的分辨率虽然很高,但感知范围有限,只有约60米,而在阳光直射下只有30米。此外,激光雷达非常昂贵,譬如Google早期自动驾驶车辆上安装的高性能的激光雷达价格高达7万美元;而性能差一些的譬如Velodyne,价格仍然高达数千美元。
也有一些公司选择不使用激光雷达,譬如特斯拉,它使用的是便宜的普通雷达、视频和超声波传感器。但近期的一些碰撞事故显示,特斯拉的方案并不可靠。
而自动驾驶汽车的制造商真正想要的是一种廉价和可靠的传感器,使之与车载雷达和摄像机相结合,以提高自动驾驶的安全性。
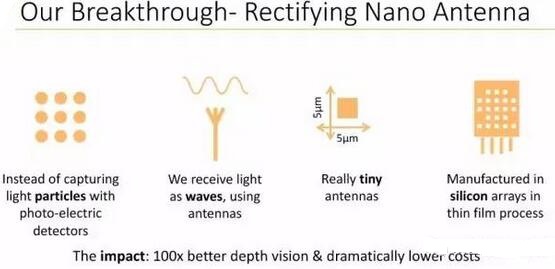
Oryx的相干光雷达系统使用一种被称为“纳米天线”的技术,不像激光雷达那样通过光电传感器来侦测光线粒子,而是根据光的“波粒二象性”以波的形式使用纳米天线来感知反射回来的信号(光)。
借助Oryx卓越的视觉感知能力,自动驾驶汽车可以精确而有效地感知周围的环境,更加容易地做出正确和安全的自动驾驶决策。由于有了更加丰富的深度感测数据,因此对算法的要求更低、系统响应的速度更快,对计算能力的要求更低。在对机器错误非常敏感的自动驾驶环境中,这种额外的性能和精度水平成为了决定安全与危险之间那决定性的1%差别的关键因素。
Oryx的纳米天线可以接收波长为10微米的电磁波,这种波长能有效穿透烟雾,而且不会像激光雷达那样受强光影响。Oryx的技术大大提高了自动驾驶汽车的感知范围和灵敏度,其相干光雷达可以精确定位60米内路面上的碎片、100米内的行人和150米内的摩托车,明显优于现有系统的性能。
技术特点
1、Oryx的激光器使用的是长波太赫兹红外激光,因为这种红外光人眼不可见,所以Oryx可以在其相干光雷达系统上使用比激光雷达更高的功率。而这种红外光还很难被水吸收,这意味着Oryx的相干光雷达不会像激光雷达和摄像机那样被云雾、强烈的阳光直射所干扰。
2、Oryx的激光器不需要使用机械反射镜或相控阵来转向以捕获场景,无转向控制、旋转部件以及带来的光反射过程,其使用的是简单的光学元件传播激光束以照射车辆前方,其成像系统的成本与手机上的摄像头成本相当,因此其价格比激光雷达便宜地多。
3、当发射出的激光反射会传感器时,Oryx使用了第二组光学器件将反射回的入射光引导到大量极小的整流纳米天线上。入射光在被整流的天线中产生AC响应,换句话说,被转换成DC信号。该系统的灵敏度是传统激光雷达的上百倍。因为天线将入射光处理为波,所以它们还可以检测到多普勒效应 - 由于其反弹的相对运动而引起的频率变化,并且由此还可以确定在道路中或附近的其他物体的速度。
4、每个纳米天线只有5平方微米;它们将最终使用薄膜芯片制造工艺直接制造在集成电路上。这将使得信号被馈送到机器学习系统相当简单,而这个机器学习系统可以对场景中的对象进行分类,从而使得对场景的感知更加智能化。
竞争优势
1、全天候:Oryx Vision系统以10微米的波长发送对肉眼安全的不可见光,这种波长的光能有效穿透烟雾,既可以在黑夜工作,也不会受强光影响。
2、精度高:用纳米天线阵列接收返回的信号(波)并对其进行完全相干处理,具有多普勒探测能力,其深度分辨率不仅远优于雷达,还大大优于激光雷达。
3、探测距离远:以波的形式接收光,探测距离高于激光雷达。
4、成本低:使用简单的光学器件,无转向控制、旋转部件,而且整个系统都封装在没有移动部件的固态系统中,工作可靠、成本低。

市场潜力
随着物联网技术的发展,自动驾驶汽车技术越来越成熟,但如何在探测距离、精度和成本之间找到平衡一直是困扰自动驾驶汽车商业化的一个主要问题,Oryx找到了一条能够实现三者完美平衡的路径,为自动驾驶汽车最终迈向市场化铺平了道路。
融资状态
A轮:1700万美元,2016年10月
投资者:Bessemer Venture Partners、Maniv Mobility、Trucks VC
延伸阅读: