自动驾驶传感技术培训课程
2019-02-25 22:38:47 来源:麦姆斯咨询 评论:0 点击:
本课程主要面向汽车、自动驾驶及传感器企业,包括各类车载传感器及核心元器件厂商、自动驾驶系统集成方案以及整车厂的技术研发人员、高校师生,同时也欢迎其他希望了解自动驾驶产业的非技术背景人员参加,如销售和市场人员、投融资机构人员、政府管理人员等。
课程名称:自动驾驶传感技术培训课程
主办单位:麦姆斯咨询
协办单位:华强电子网、上海传感信息科技有限公司
支持单位:无锡微纳产业发展有限公司、创星咖啡
一、课程简介
当前,自动驾驶汽车的演进可谓进入了群雄争霸的“战国时代”,无论科技巨头、主流车企,还是Uber、特斯拉等新创公司,莫不投入庞大的人力物力。自动驾驶技术正在将汽车产业推入一个全新时代,谁能掌握最新的技术,谁就能在这场汽车科技大战中成为最具影响力的玩家。
实现自动驾驶主要包括“环境感知——智能决策——控制执行”三个关键环节,其中环境感知是实现自动驾驶的硬件核心基础。人在行走时,依靠眼观六路,耳听八方,而自动驾驶的“眼”和“耳”就是安装在车上的各种传感器。汽车通过传感器实现对周围环境和车辆状态的感测和信息收集,其中毫米波雷达(RADAR)、激光雷达(LiDAR)、车载摄像头(Camera)是实现自动驾驶环境感知最重要的三种传感器。

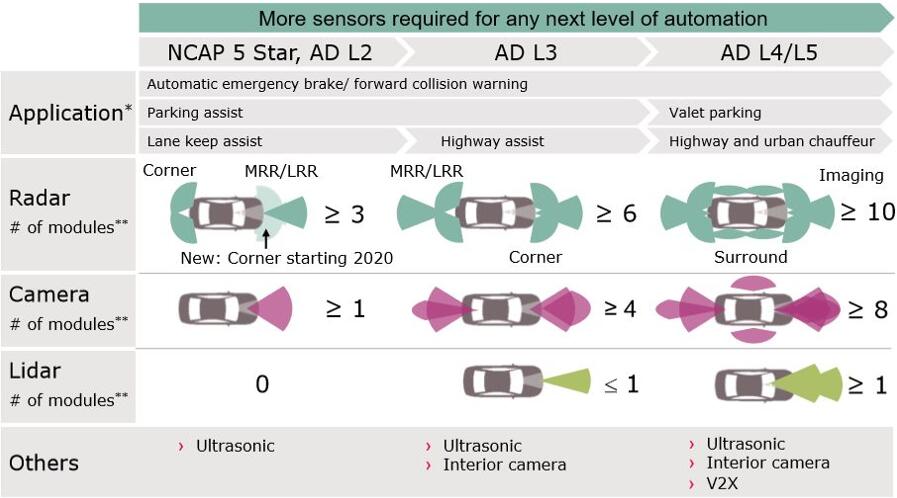
毫米波雷达、激光雷达和摄像头为汽车自动驾驶实现360度的环境感知
在环境感知中,每一种传感器都有独特的优势和劣势。例如,毫米波雷达可靠性高,可以探测物体距离与速度,不受天气影响可全天候全天时工作,但分辨率不高,不能区分人和物;而摄像头很高的分辨率,能够识别颜色和字体,有助于检测道路标志、交通信号灯以及行人,但受黑夜、强光影响较大;激光雷达则能够提供三维感知信息,对环境的重构能力强,可进行实时定位和高精度障碍物的分类和检测,但受天气环境影响大。这三种传感器各有优劣,既难以互相替代,又缺一不可。随着自动驾驶不断向更高智能化、自动化等级发展,集成在汽车上传感器数量和种类将不断增加,业界普遍认为“传感器融合(sensor fusion)”可显著提高系统的冗余度和容错性,从而保证决策的快速性和正确性,是实现高度自动化驾驶安全性的关键。
自动驾驶发展进程驱动传感器需求增加
根据《自动驾驶汽车传感器-2018版》报告预测,2032年自动驾驶汽车生产相关的总体营收将达到3000亿美元,未来15年内该市场的复合年增长率(CAGR)高达58%。这意味着未来15年内整个行业将围绕自动驾驶汽车技术进行构建,相应地,自动驾驶对传感器的需求也是水涨船高。根据目前汽车行业情况,Yole预计2032年自动驾驶激光雷达市场营收将达到315亿美元,自动驾驶毫米波雷达市场营收将达到17亿美元,自动驾驶摄像头市场营收将达到210亿美元。这对于现有传感器技术厂商而言无疑是巨大的机遇。
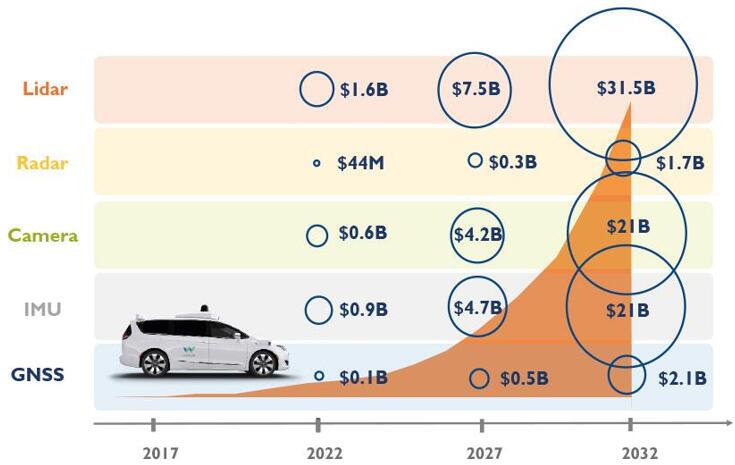
自动驾驶汽车集成的传感器市场预测
(来源:《自动驾驶汽车传感器-2018版》)
为推动自动驾驶产业发展,提升从业人员技术水平,麦姆斯咨询特开设《自动驾驶传感技术培训课程》,课程围绕毫米波雷达、激光雷达和车载摄像头三大核心环境感知传感器展开,从核心元器件到系统进行深入讲解,主要包括:(1)毫米波雷达技术及应用;(2)毫米波雷达核心MMIC芯片技术;(3)激光雷达技术及应用;(4)激光雷达核心元器件:垂直腔面发射激光器(VCSEL);(5)激光雷达核心元器件:MEMS微镜;(6)激光雷达核心元器件:光电探测器(以APD/SPAD为主);(7)车载摄像头及3D视觉技术;(8)车载镜头技术及应用。
二、培训对象
本课程主要面向汽车、自动驾驶及传感器企业,包括各类车载传感器及核心元器件厂商、自动驾驶系统集成方案以及整车厂的技术研发人员、高校师生,同时也欢迎其他希望了解自动驾驶产业的非技术背景人员参加,如销售和市场人员、投融资机构人员、政府管理人员等。
三、培训时间
培训时间:2019年4月26日~4月28日。
授课结束后,为学员颁发麦姆斯咨询的结业证书。
四、培训地点
无锡市菱湖大道200号中国传感网国际创新园
五、课程内容
课程一:毫米波雷达技术及应用
讲师:苏州豪米波技术有限公司 董事长 白杰
授课内容:车载毫米波雷达由于可以全天候全天时工作,而且成本较低、技术比较成熟,已率先成为自动驾驶高级驾驶辅助系统(ADAS)的主力传感器,被广泛应用于自适应巡航控制(ACC)、前向碰撞预警(FCW)、盲点监测(BSD)、自动紧急制动(AEB)等功能。本课程将详解毫米波雷达知识,重点介绍面向自动驾驶的毫米波雷达设计与测评、基于毫米波雷达的ACC系统设计,以及自动驾驶系统的构成、决策与控制,并探讨毫米波雷达的技术发展趋势以及产业链分布等。
课程大纲:
(1)智能网联汽车技术发展现状与趋势;
(2)毫米波雷达的基础知识;
(3)面向自动驾驶的毫米波雷达设计与测评;
(4)基于毫米波雷达的ACC系统设计;
(5)自动驾驶系统的构成、决策与控制;
(6)毫米波雷达面临的挑战和技术发展趋势;
(7)毫米波雷达产业链及主要厂商。
课程二:毫米波雷达核心MMIC芯片技术
讲师:上海矽杰微电子有限公司 CEO 卢煜旻
随着自动驾驶等级的提升,加载在汽车上的毫米波雷达数量不断增加,然而汽车的空间和成本有限,所以毫米波雷达必然朝着小型化、低成本、高分辨率方向发展。单片微波集成电路(MMIC)的出现大大简化了雷达系统结构,集成度高,有利于大规模生产。本课程主要将对毫米波雷达MMIC芯片设计及制造、MMIC芯片评估与参考设计、雷达信号处理及算法、典型应用方案及主要供应商等进行详细介绍。
课程大纲:
(1)毫米波雷达MMIC芯片设计及制造;
(2)毫米波雷达MMIC芯片评估及参考设计;
(3)毫米波雷达信号处理及算法;
(4)典型毫米波雷达应用方案;
(5)毫米波雷达MMIC芯片发展趋势;
(6)毫米波雷达MMIC芯片主要供应商。
课程三:激光雷达技术及应用
讲师:深圳力策科技有限公司 总经理 张忠祥
授课内容:激光雷达(LiDAR)由于能够实时地扫描周围环境并建立高精度3D模型,被视为是实现L3~L5级高级别自动驾驶最关键的传感器,将承担主要的中长距测距和环境感知任务,实时绘制出车辆周边的3D空间地图。本课程将对激光雷达的基本概念、工作原理、主要的技术路线、技术挑战和发展趋势以及产业链等进行详细介绍。
课程大纲:
(1)激光雷达基本概念及工作原理;
(2)多种激光雷达技术路线分析:机械式激光雷达、MEMS激光雷达、纯固态激光雷达(相控阵、泛光面阵等);
(3)自动驾驶技术对激光雷达的要求;
(4)激光雷达的技术挑战与发展趋势;
(5)激光雷达产业链及主要厂商。
课程四:激光雷达核心元器件:垂直腔面发射激光器(VCSEL)
讲师:中国科学院长春光学精密机械与物理研究所 副研究员 张建伟
授课内容:车载激光雷达需要足够远的探测距离,对激光的功率有较高的要求。相对功率而言,边发射激光器(EEL)目前有一定的优势。但是,随着高功率垂直腔面发射激光器(VCSEL)的研发进步,及相应波段的高灵敏度接收器的逐渐成熟,采用VCSEL的车载激光雷达已成为业界研发热点。本课程将对近红外波段半导体激光器(EEL和VCSEL)进行阐述,重点对高功率VCSEL激光技术及发展、制造关键技术和主要供应商等进行深入讲解。
课程大纲:
(1)近红外波段半导体激光光源介绍(EEL和VCSEL);
(2)激光雷达用高功率VCSEL激光技术及发展;
(3)高功率VCSEL激光器制造、封装工艺流程及关键技术;
(4)现阶段VCSEL产业链及主要供应商。
课程五:激光雷达核心元器件:MEMS微镜
讲师:中国科学院苏州纳米技术与纳米仿生研究所 博士生导师 沈文江
授课内容:虽然目前大多数激光雷达产品仍以机械式扫描为主,不过以MEMS微镜为核心元器件的混合固态激光雷达有望成为汽车激光雷达最快落地的技术方向。MEMS微镜是光学MEMS执行器的典型器件,技术门槛高,对材料、工艺加工要求苛刻。本课程将对MEMS微镜的原理、设计、制造、封装和测试、应用和主要供应商等进行详细介绍。
课程大纲:
(1)MEMS微镜结构和应用前景;
(2)MEMS微镜工作原理(静电、电热、电磁、压电);
(3)MEMS微镜在车载激光雷达中的应用;
(4)MEMS微镜设计、制造、封装和测试的主要问题和解决方法;
(5)MEMS微镜主要供应商。
课程六:激光雷达核心元器件:光电探测器(以APD/SPAD为主)
讲师:中国科学院上海技术物理研究所 副研究员 程正喜
光电探测器是将光脉冲转换成电信号的元器件,在LiDAR系统中充当“眼睛”的角色,是关键的传感器。雪崩二极管(APD)是一种主要的光电探测器,其工作模式分为线性模式和盖革模式两种。工作在盖革模式下的APD又被称作SPAD。SPAD具有灵敏度高、响应快、探测距离远等特点,非常适合用在LiDAR。本课程将对光电探测器(以APD/SPAD为主)的发展、原理、应用、常见问题及解决方法、产业链进行深入讲解。
课程大纲:
(1)不同光电探测器类型介绍(PIN、APD、SPAD、SiPM等);
(2)APD/SPAD的工作原理及主要性能参数;
(3)APD/SPAD在车载激光雷达中的应用及发展;
(4)APD/SPAD设计、制造、封装和测试的主要问题和解决方法;
(5)APD/SPAD主要供应商。
课程七:车载摄像头及3D视觉技术
讲师:上海爱观视觉科技有限公司 高级研发工程师 缪寅明
授课内容:在自动驾驶技术中,利用摄像头来实现视觉感知的优势非常明显:分辨率高、成本低且算法成熟。传统的摄像头成像是二维的,缺乏深度和距离的信息。得益于深度学习算法的进步,具有三维(3D)视觉功能的单目和双目摄像头,能够实现道路状况的3D感知,做出更精确的道路识别和障碍物检测,已被应用于车道偏离预警(LDW)和前方碰撞预警(FCW)等ADAS功能中。本课程将详解视觉传感器的基本构成,重点介绍基于摄像头的3D视觉感知方案、车载摄像头在自动驾驶中的应用,并探讨车载摄像头的技术发展趋势以及产业链分布等。
课程大纲:
(1)视觉传感器的主要构成(镜头、图像传感器、图像信号处理器);
(2)基于摄像头的3D视觉感知方案(单目、双目、多目等);
(3)车载摄像头在自动驾驶中的应用;
(4)车载摄像头的技术发展趋势;
(5)车载摄像头产业链及主要厂商。
课程八:车载镜头技术及应用
讲师:舜宇车载光学技术有限公司 市场营销总监 谷春燕
授课内容:自动驾驶汽车中,激光雷达、摄像头等光学传感器充当了“汽车之眼”。而镜头是这些光学传感器最核心的组件。车载镜头要做到“车规级”,需要考虑光学焦平面的稳定性、光学焦平面和相机的热补偿,以及部分产品可靠性的损伤等多方面的要求。因而,在设计、材料选择、工艺技术、检测、管理流程上,车规级镜头都比普通的消费级产品要求更为严苛和技术门槛更高。本课程将对车载镜头在自动驾驶中的应用进行分类介绍,将对车载镜头的设计、制造、封装和检测、技术发展以及主要供应商等进行详细讲解。
课程大纲:
(1)车载镜头在自动驾驶中应用及种类(摄像头、激光雷达、平视显示器、智能大灯等);
(2)不同应用中车载镜头的特性要求和主要性能;
(3)车载镜头的设计、制造、封装和检测主要难点和解决方案;
(4)车载镜头工艺技术发展趋势;
(5)车载镜头主要供应商。
六、师资介绍
白杰,博士,苏州豪米波技术有限公司董事长。2010年入选第五批千人计划国家特聘专家。2014年至今任职同济大学教授,2016年起担任国家十三五重大专项“电动汽车智能辅助驾驶技术研发及产业化”项目总负责人,并作为研究骨干参与另一国家十三五重大专项“智能电动汽车的感知、决策与控制关键基础问题研究”项目。主要从事汽车环境感知与信息融合技术、高分辨率汽车毫米波雷达技术、雷达相机一体化及其智能汽车技术应用等方面的科研与教学工作。目前担任中国人工智能学会智能驾驶专业分会副主任委员,中国汽车工程学会智能交通分会秘书长。
卢煜旻,博士,拥有复旦大学学士学位,美国俄亥俄州立大学硕士学位及密西根大学博士学位,第十批国家“千人计划(青年)”入选者。目前任上海矽杰微电子有限公司董事长兼总经理。卢博士在半导体、射频及微波集成电路设计领域拥有15年丰富的产品开发经验。曾先后任职于上海微技术工业研究院,恩智浦半导体(美国),M/A-COM及Autoliv Electronics 等公司担任技术及管理工作。卢博士拥有多项美国专利,并担任IEEE高级会员。
张忠祥,博士,于2007和2011年分别获得中国科学技术大学学士学位和香港中文大学博士学位,先后访问美国哈佛大学、台湾清华大学等著名研究组,并且获得联发科-吴大猷学者奖学金、中国海洋石油(CNOOC)Global Excellent Researcher、深圳市海外高层次人才孔雀计划B类等荣誉奖励。博士毕业后任职于香港生产力促进局。2013年10月创办深圳力策科技有限公司并任总经理。公司致力于发展激光雷达技术在机器人、AGV、无人驾驶等领域的应用,2017年获得国家高新技术企业资质。
沈文江,博士,中国科学院苏州纳米技术与纳米仿生研究所博士生导师。本科和硕士毕业于清华大学材料科学与工程系;2004年博士毕业于加州大学洛杉矶分校(UCLA)机械工程系。博士毕业后,在California NanoSystem Institute (CNSI)进行一年半的博士后研究工作。2005年底,作为研发工程师加入MEMS公司Innovative Micro Technology,2008年被提拔为项目经理。沈文江博士有丰富的微机电系统器件的研发和产业化经验,领导的团队成功地把多个MEMS产品从研发阶段做到量产阶段。沈文江博士同时活跃在微机电系统研究的前沿领域。跟麻省理工学院(MIT)研究组合作,研发出世界上最灵敏的流体中的质量传感器,可以探测流体中单个细胞、病毒,成果发表在Nature杂志上。在此基础上,用了2年时间成功把这个尖端科技商业化,研发出用于测量液体中微纳颗粒、单细胞、病毒的检测系统,该系统获得2010年R&D 100 Awards和2010年Pittcon Editors’ Gold Award。2011年11月加入中科院苏州纳米所。研究兴趣主要集中在微米和纳米尺度制造,应用微纳制造技术来设计和制造微纳器件,并且把这些器件应用在能源、光学显示,以及生物等领域。
张建伟,博士,中国科学院长春光学精密机械与物理研究所副研究员,在垂直腔面发射激光器(VCSEL)研制领域有近十年的研究经验,目前主要开展窄脉冲、高功率VCSEL激光器以及高温工作VCSEL激光器的外延结构优化及工艺制备。实现980nm VCSEL串接列阵模块脉冲激光功率210W;实现910nm VCSEL串接列阵模块脉冲激光功率大于100W;实现VCSEL发光单元在高温(≥80℃)下的极低阈值电流(≤0.3mA),所报道的成果曾受国际知名同行杂志Semiconductor Today专题报道。作为项目负责人在VCSEL激光器研究方向承担了科技部重点研发计划项目、国家自然基金面上项目、吉林省重点科技研发计划等10余项国家级或省部级项目,发表论文20余篇,获授权发明专利5项,获得省部级奖项2项。
程正喜,副研究员,硕士生导师。2007年加入上海技术物理研究所硅器件研究室,目前担任室主任助理。2012年从上海技术物理研究所获得博士学位,2015-2017年在东京大学进行博士后研究。2018年入选上海浦江人才计划。主要研究硅光电探测器(APD和SPAD)和光微机电系统器件。先后完成包括总装备部预研项目、国家自然科学基金、重大技改项目和所“十三五”重点培育方向性项目等多个重要预先研究项目。
缪寅明,硕士,获得北京大学数学科学学院理学学士和日本东京工业大学信息处理专业工学硕士。留日期间在日本Bi2-Vision公司和同事利用人眼仿生的原理研制了世界上目前最先进的全自动3D拍摄系统,是软件核心算法的主要贡献人之一。同时参与了日本文部科学省的重大专项。现任职于上海爱观视觉科技有限公司高级研发工程师。参与研发了包括固定立体双目相机、可动仿生人眼、轨道交通视觉检测系统、多轴自动监视系统等产品。共同设计和实现了大量相关算法,包括稠密3D重建、人体识别、人脸识别和追踪、物体测量、3D障碍物检测、视觉SLAM等,其应用方向包括工业检测、智能安防、机器人自动导航、AR/VR等。有近10年计算机视觉相关开发经历,在理论研究和工业实现方面均有丰富的经验。
谷春燕,宁波舜宇车载光学技术有限公司全球市场营销总监。十几年深耕于车载摄像头行业,并多年研究分析智能驾驶市场、光学在汽车上的应用及发展趋势,拥有丰富的车载摄像头市场营销经验。多次接受业内知名媒体专访,在国际性展会论坛上发表精彩演说。曾应邀作为业内智能驾驶相关微课程专场嘉宾开堂授课,500+汽车行业人士参与其中,受到广泛好评。
七、培训费用和报名方式咨询
请发送电子邮件至XiaoLi@memsconsulting.com,邮件题目格式为:报名+自动驾驶传感技术培训+单位名称+人数。
麦姆斯咨询
联系人:肖莉
电话:18861567166
E-mail:XiaoLi@memsconsulting.com
上一篇:2018年“见微知著”系列培训课程回顾:学员心声(二)
下一篇:机会难得!Espros TOF学院首度来中国开课!