基于SPAD响应线性化的无直方图激光雷达
2024-01-20 17:02:00 来源:麦姆斯咨询 评论:0 点击:
研究人员展示了新颖的模拟线性探测器行为的SPAD采集方案。更详细地说,他们展示了两种从真实SPAD获得线性化SPAD响应的方法:“采集或丢弃(acquire or discard)”;时间门控(Time-gated)。
3D成像技术实现的空间感知在工业、汽车、航空航天和消费电子应用等领域不断引起人们的关注。例如,自动驾驶汽车所需的自我感知水平要求具有高分辨率和高帧率的3D成像系统。遗憾的是,这些要求相互冲突,迫使工程师不得不进行性能限制的权衡。基于单光子雪崩二极管(SPAD)的激光雷达(LiDAR)/直接飞行时间(d-ToF)测量是主动探测方法中最有前景的技术之一。在基于SPAD的d-ToF测量中,距离是通过测量从光源投射并由目标反射回探测器的光脉冲的行进时间来提取的,探测器由作为光子-边缘转换器的SPAD构成,与光子时间戳(timestamping)电路(通常是时间数字-转换器(TDC)或时间-幅度转换器(TAC))相耦合。由于硬件限制,例如探测器的死区时间(dead-time)和光子的统计性质,以及不相关背景光的存在,大量观测值通常会被累积到直方图内存中以提高信噪比,并通过信号处理技术提取目标距离。
据麦姆斯咨询报道,近日,意大利布鲁诺·凯斯勒基金会(FBK)和特伦托大学(University of Trento)的研究人员组成的研究团队在IEEE Sensors Journal期刊上发表了题为“Histogram-less LiDAR through SPAD response linearization”的论文,提出了一种从基于SPAD的直接飞行时间(d-ToF)成像系统中获取3D信息的新方法,该方法不需要构建时间戳直方图,并且能够承受高通量运行机制。所提出的采集方案模拟了SPAD探测器的行为,不会因死区时间而导致失真,并通过对光子时间戳进行简单的平均运算来提取ToF信息,确保易于集成到专用传感器中并可扩展至大型阵列。该方法通过全面的数学分析得到验证,其预测结果与此问题的数值蒙特卡罗模型(Monte Carlo model)一致。最后,在具有挑战性的背景条件下,研究人员展示了真实d-ToF测量设置中预测结果的有效性,远远超出了3.8 m距离内5%检测率的典型堆积(pile-up)极限。
典型的d-ToF图像采集需要一个脉冲激光器和一个具有光子时间戳功能的时间分辨单光子图像传感器。ToF通常是通过查找峰值或急剧上升沿(可能属于反射激光脉冲)的位置从直方图估算的。时间戳直方图包含了正确估算飞行时间的所有相关信息,代表了基于SPAD的d-ToF系统领域的黄金标准处理技术。遗憾的是,直方图在内存、带宽和功耗方面需要大量资源,因为它需要从传感器中读取每个时间戳,以便由外部控制器(FPGA或微控制器)进行处理。即使使用片上(on-chip)直方图的最新技术,所需的资源量仍然是相当大的。例如,一个具有100 ps时间分辨率和8位直方图深度的10米范围的128 × 128激光雷达系统大约需要10 MB内存。
如果不存在背景事件,并且忽略激激光脉冲的宽度,研究人员可以在不构建直方图的情况下估算飞行时间。这可以通过简单地计算仅包含激光时间戳的连续数据流的平均值来实现。为了将上述方法扩展到存在背景事件的情况,研究人员需要消除它们对平均值的贡献。
研究人员分两步实现无直方图方案。首先,他们提出并评估了一种算法,基于简单的即时平均操作从一组时间戳中有效地提取目标距离,无需分配直方图内存。然后,由于所提出的算法基于探测器响应是线性的假设,因此他们提出了两种可以在芯片上轻松实现的采集方案,并模拟没有死区时间的单光子探测器的行为,从而对光子的输入通量提供所需的线性响应。
为了实现所提出的提取方法,研究人员展示了新颖的模拟线性探测器行为的SPAD采集方案。更详细地说,他们展示了两种从真实SPAD获得线性化SPAD响应的方法:“采集或丢弃(acquire or discard)”;时间门控(Time-gated)。这两种方法都基于这样的假设:基础统计过程是平稳且遍历的。
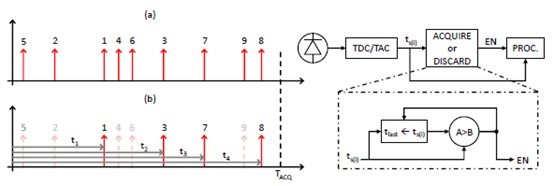
图1 采用“acquire or discard”采集方法的SPAD响应线性化示例
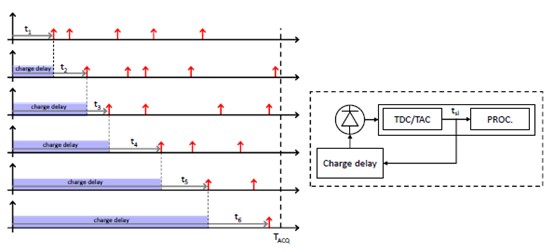
图2 采用时间门控采集方法的SPAD响应线性化示例
研究人员将所提出的无直方图采集方法与最先进的基于SPAD的激光雷达传感器在内存要求、可扩展性和高背景光通量的耐受性方面进行了比较。
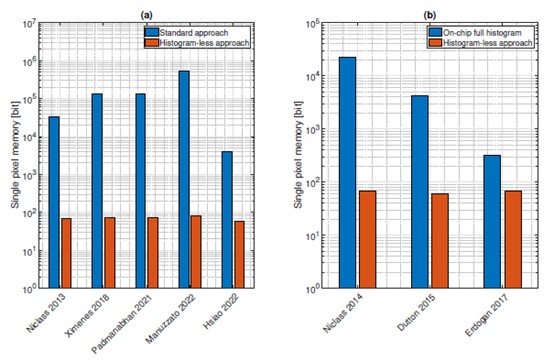
图3 无直方图采集方法与基于直方图的d-ToF传感器所需的每像素内存量的比较
所提出的采集方案已通过使用现有基于SPAD的单点d-ToF传感器(其架构与Perenzoni等人的架构类似,此外还提供了片上直方图功能)的真实数据进行测量和验证。该传感器采用Xu等人开发的SPAD技术,并采用标准150 nm CMOS工艺制造。背景事件是通过直接指向传感器的约180 W光纤耦合卤素照明器产生的,具有约10%反射率的黑色哑光面板被选择作为目标,距离范围为1 m至3.8 m。图4显示了实验设置,并在其中标明了主要组件。首先,研究人员通过仅考虑背景光来重点验证所提出的采集方案的线性化行为。然后,他们考虑将背景和激光结合在一起,就像在真实场景中一样,并使用所提出的无直方图采集方案来计算ToF。测量结果表明,所提出的采集和提取方案无需时间戳直方图就能成功计算ToF。
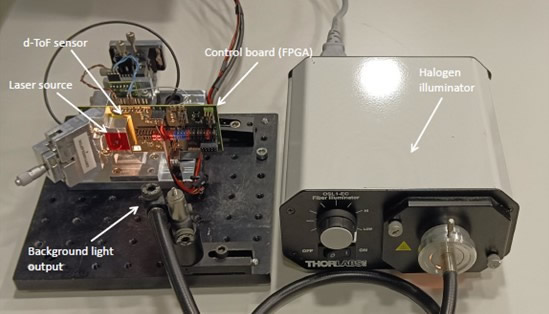
图4 实验设置
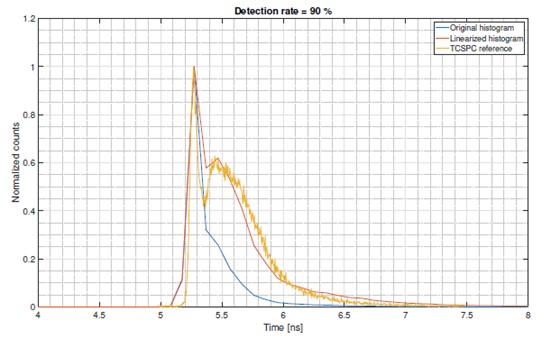
图5 所提出的SPAD线性化方法在强堆积条件下的行为表征
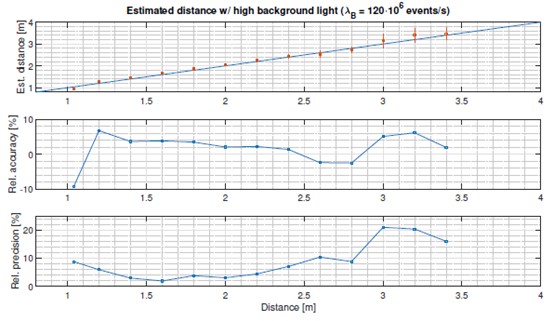
图6 高背景光通量情况下的测量结果
综上所述,这项研究工作展示了如何在基于SPAD的d-ToF系统中提取飞行时间信息,而无需构建占用资源和带宽的时间戳直方图。此外,所提出的方法能够承受高光子通量,并且能够承受比传统公认的5%的极限高三个数量级的检测率。该采集方法基于SPAD响应的线性化,适用于使用低资源的CMOS技术集成,由于它可以轻松地按像素集成,因此可扩展到大型阵列。所提出的提取方法已经通过蒙特卡罗数值模拟进行了完全表征。该方法在数学上也得到了证明,研究人员通过重新配置现有的d-ToF传感器并使用真实数据提取ToF的实际测量证明了其有效性。所提出的提取方法可以至少以两种方式实现,即通过“acquire or discard”或时间门控检测方案。虽然“acquire or discard”方案允许使用最少的资源,但它存在积分时间较长的问题,尤其是当光子通量过高时。另一方面,时间门控方案可以保证更有效的采集,但要以每像素的可控延迟元件为代价。混合方案采用了粗略但简单的延迟元件来实现时间门控采集,并在剩余时间量上依赖于“acquire or discard”方案,可以同时保证紧凑的硬件实现和优化的采集时间。研究人员通过使用极少量的资源(仅需要两个计数器和一个累加器)证明了所提出的ToF提取方法的有效性。
论文信息:DOI: 10.1109/JSEN.2023.3342609
延伸阅读:
上一篇:首款集成Spectricity多光谱摄像头的智能手机亮相CES 2024
下一篇:多光谱光声成像+造影剂,可实时识别癌细胞