硅光子学赋予FMCW激光雷达更高安全性
2019-07-07 09:18:40 来源:麦姆斯咨询 评论:0 点击:
麦姆斯咨询:FMCW解决方案比当前脉冲式dToF激光雷达解决方案的峰值激光功率低四个数量级以上,在测量距离、瞬时速度、环境抑制、多用户无干扰操作等方面优势明显,同时具备集成完整激光雷达光学系统于一颗尺寸非常小的低成本硅光子芯片的潜力。
现有激光雷达(LiDAR)已具备足够强的竞争力。与硅光子学结合,可进一步实现成本的降低和安全性的提高!
据麦姆斯咨询报道,关于雷达(英文名RADAR,全称Radio Detection and Ranging)的历史可以追溯到19世纪80年代,当时著名的德国物理学家海因里希·赫兹(Heinrich Hertz)证明了无线电波可被金属物体反射。根据赫兹所证明的原理,德国工程师侯斯美尔(Christian Hülsmeyer)于1906年首次申请了用于海上航行雷达的实用专利。在二战前,出于空中防御的目的,雷达的研发开始全面展开。随着半导体技术的进步,雷达现在已广泛应用于从空中交通管制到汽车盲点检测等多个应用领域。归功于上述的进步,雷达技术让海陆空的旅程变得更加安全和高效,已预防了数十万起事故。
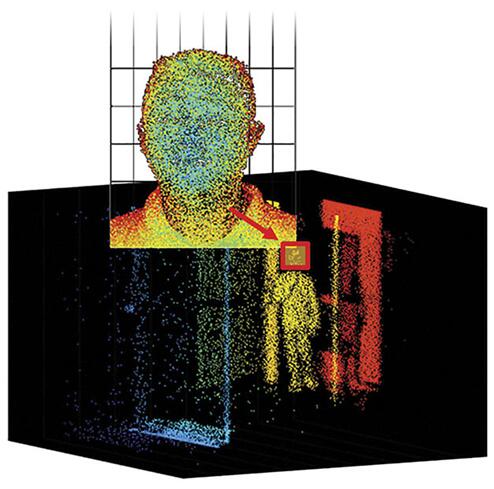
对人眼安全的FMCW激光雷达可用于长距离3D人脸识别(图片来自:SiLC Technologies)
激光雷达与雷达有不少相似之处。不同的是激光雷达(LiDAR)使用光而不是射频(RF)进行探测和测距。激光技术问世不久,20世纪60年代初激光雷达系统首次出现。激光雷达通过发出聚焦光束并测量光信号的往返时间来计算距离。从那时起,激光雷达就出现于从地形测量到自动导航系统的各种应用中(图1)。
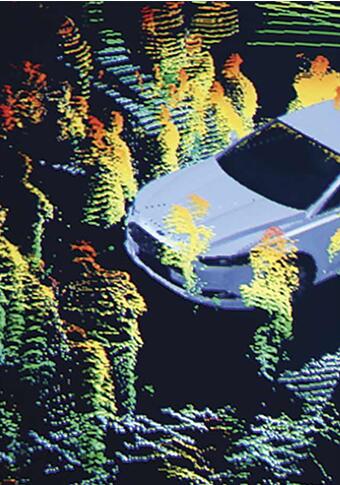
图1:激光雷达的图像提供更详细的环境信息
雷达与激光雷达
与雷达类似,最初激光雷达采用一种简单的直接探测方法。发射一个短而明亮的激光脉冲,测量返回所需的时间,并转换为距离信息。这种方法也被称为脉冲式(Pulsed)直接飞行时间法(dToF)激光雷达。基于脉冲式dToF的扫描式激光雷达对视场内的物体进行激光扫描,并提供环境的三维图像。与射频相比,光的波长更短,具有更小的光斑尺寸和更高的分辨率。
不过,雷达迅速演进到使用相干探测方法,这种方法考虑了发射信号的频率和相位。相干雷达系统的最大优点是能够检测到回波信号的小相位偏移,利用多普勒效应大大减少来自固定杂波或静止物体信号的影响。最新一代的汽车雷达以调频连续波(FMCW)技术为基础,作为提高发射效率、提高灵敏度和抗干扰能力的最佳调制(图2)。
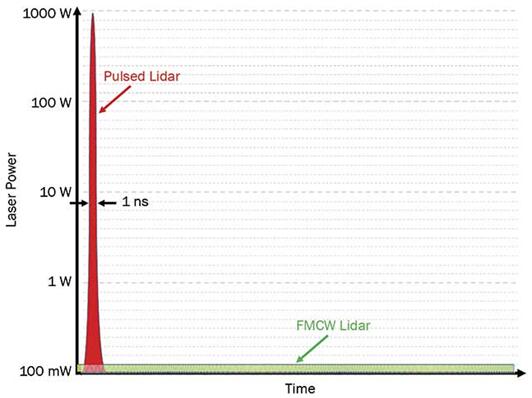
图2:脉冲式dToF激光雷达发射一个非常窄的高功率激光脉冲,通过测量飞行时间来确认物体的距离。相比之下,FMCW激光雷达提供低功率的频率啁啾,被测物体的距离和速度以频移的形式得出。(图片来自:SiLC Technologies)
缺乏廉价相干激光器和接收器以及相关的低成本芯片集成技术,造成了大多数商用激光雷达系统仍然是脉冲式dToF激光雷达的局面,也减缓了激光雷达向FMCW技术路线的演进速度。
脉冲式dToF激光雷达与FMCW激光雷达
脉冲式dToF和FMCW方法均能测量来自动物和衣物等物体高度漫射表面的反射。最终,激光雷达解决方案提供的测量范围和能见度由系统的功率水平和信噪比(SNR)决定。与脉冲式dToF相比,FMCW提供高于10倍的信噪比,1550nm波长的光源可使功率提高40倍(图3)。对脉冲式dToF激光雷达而言,决定最大测量范围的信噪比与峰值激光功率成正比。这需要将所有可用的光子压缩成一道狭窄的(纳秒级)明亮激光闪光。对于1550nm的激光,脉冲峰值激光功率可以高达几千瓦。如此高的峰值功率,虽然对人类和大多数动物眼睛安全,但对图像传感器有害。
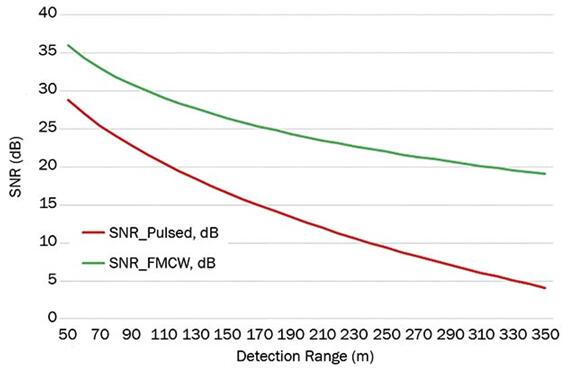
图3:脉冲式dToF激光雷达和FMCW激光雷达的信噪比对比。假设:1英寸的接收孔径;脉冲式dToF激光雷达使用增益为20的雪崩光电二极管,而FMCW激光雷达使用更简单的无增益管脚光电二极管;目标物体反射率为5%。两种情况下的损耗均为6分贝。平均激光功率为30mW。(图片来自:SiLC Technologies)
激光雷达的技术演进,必然会像雷达一样采用相干探测方法。一些公司使用的激光频率啁啾与雷达系统中已经使用的频率啁啾类似,不是简单的脉冲。这类相干激光雷达基于FMCW技术,得到更高的探测灵敏度和准确性,并解决了脉冲式dToF激光雷达的许多缺点,例如对背景辐射的抗扰能力差、多用户干扰和缺少瞬时速度信息。FMCW激光雷达的信噪比与发射光子总数成正比,而不是与峰值激光功率成正比。此外,由于FMCW激光雷达的灵敏度高出脉冲式dToF激光雷达10倍,平均发射功率却是脉冲激光雷达的十分之一。因此,FMCW激光雷达能够以小于100mW的峰值激光功率发射周期较长的波形,以获得与脉冲式dToF激光雷达相同的信噪比,同时具有较低的功率(图4)。
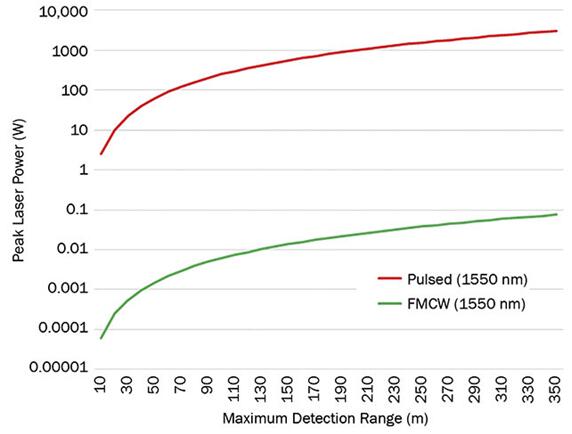
图4:与脉冲式dToF激光雷达相比,FMCW激光雷达对峰值激光功率的要求至少低四个数量级。(图片来自:SiLC Technologies)
Bastion Schwarz和两位同事发布的最新研究表明,峰值激光功率比激光功率平均值对CMOS(互补金属氧化物半导体)和CCD(电荷耦合器件)传感器的危害更大。CMOS和CCD传感器的损伤阈值测定为10kW/mm²。由于摄像头镜头可以进一步聚焦光线,因此将该值又降低了1万倍,也就是1W的激光脉冲就可能对摄像头造成损害。如果功率低于上述数值,那FMCW激光雷达对摄像头和人眼来讲更安全。
反射率和成本
1550nm FMCW激光雷达系统在测量距离和瞬时速度两个参数上具有优势。相干探测的高信噪比,加之1550nm波长的人眼安全性,意味着1550nm FMCW激光雷达在公路上行驶时,可以很容易探测到前方300米以外的轮胎或类似的低反射率物体。在极端天气条件下,包括雷暴天气,这一探测距离足够让以70英里/小时速度行驶的车辆有足够的时间停车或变换车道。FMCW技术还可以通过多普勒效应即时测量物体速度。此功能非常重要,不仅因为它支持预测性分析和响应,还能够从原始点云数据中区分对象。
迄今为止,将FMCW解决方案推向市场的关键挑战是所需的高性能元器件无法实现低成本、大批量制造。相干技术需要具有大相干长度(窄线宽)的激光器,才能在300米的探测距离内完美工作。FMCW解决方案还需要对光进行相干处理,以提取光子携带的附加信息。这意味着需要非常精确的低噪声光信号处理(OSP)电路来构建相干接收器。此外,因为相干混合只对相同偏振的光子起作用,偏振也扮演着重要角色。激光器的波长稳定性和线性度在整个测量过程中至关重要;否则,信噪比会显著降低。
要制造出由此套光学系统定义的稳定、鲁棒性强、精确的分立元器件既困难又昂贵。两家初创公司Blackmore Sensors and Analytics Inc.(2019年5月被Aurora收购)和AEVA Inc.被两家著名的德国汽车制造商选中,并获得了大量资金,用于开发FMCW解决方案。现有的基于电信级元器件的系统成本约数万美元。这种价格可能适用于全自动驾驶汽车,取代人类驾驶员并全天候运行,但无法被L3级或L4级ADAS(高级驾驶辅助系统)的主流乘用车所接受。业界都寄希望于半导体技术的进步最终能降低激光雷达的价格。
硅光子学为激光雷达带来的福音
好消息是,能将复杂电子电路集成到小小的硅基芯片(现在普遍存在于家用消费产品中)的技术诞生了——硅光子学。硅光子学使高度复杂的光学电路实现经济有效地制造并集成到同样广泛的产品和应用中。
为了实现经济实惠的FMCW激光雷达解决方案,所有光学功能都需要集成到一颗硅基芯片中,该芯片采用的是与每年制造近万亿电子集成电路(IC)芯片相同的半导体工艺。
半导体工艺在制造性能卓越的集成电路中体现出的控制水平和精度,为实现鲁棒性强、经济高效和高质量硅光子元器件提供了成熟的技术。一种极低噪声、低损耗和偏振无关的技术可以得到非常高的信噪比,从而可以使用更低的激光功率。因此,即使人类离传感器很近,也能在远距离探测时保证人眼安全。探测到距离200米以外的几厘米大小的物体应在基于IC技术的FMCW激光雷达的能力范围内。今年1月,SiLC Technologies Inc.(以下简称:SiLC)演示了这种解决方案。该公司现专注于优化其功能并实现更高的集成度。
然而,设计硅光子电路并不容易。尽管它们基于标准的集成电路制造工艺流程,但需要专有工艺、专业技能以及专业的版图和验证知识。幸运的是,他们可以利用过去十年在电信和数据中心应用方面高达10多亿美元的投资。
由于硅光子电路体积小、功率低、成本低,因此也可以广泛应用于无人机和机器人中。硅光子电路只需要毫瓦级的输出光功率,具有很高的功率效率。效率对于电池驱动的机器来说很重要。硅光子电路可以达到毫米到微米的高精度水平,因此在生物识别、工业或医疗保健得以应用成为可能。
总而言之,FMCW解决方案比当前脉冲式dToF激光雷达解决方案的峰值激光功率低四个数量级以上,在测量距离、瞬时速度、环境抑制、多用户无干扰操作等方面优势明显,同时具备集成完整激光雷达光学系统于一颗尺寸非常小的低成本硅光子芯片的潜力。上述优势可以改变激光雷达的应用范围,想象空间远远不至于自动驾驶汽车。
关于激光雷达和反射率的知识点
环境中物体的反射率很重要,高反射率物体会对激光雷达测距指标产生误导。因此,在讨论测距指标时,必须包括各种目标物体。

道路上黑色轮胎的反射率为5%~10%

(左)一位穿着深色连帽衫的行人在夜间几乎无法被肉眼或摄像头探测到。激光雷达获取纺织品(棉和聚酯,湿或干,905nm或1550nm)的反射率在30%到60%之间。(右)野生动物是另一种常见的道路危险。根据颜色和波长的不同,激光雷达获取动物皮毛的反射率在40%到90%之间。
延伸阅读:
相关热词搜索:FMCW 硅光子 激光雷达 LiDAR 激光器
上一篇:美军方利用红外探测技术开发心脏识别设备:200米内识别人体
下一篇:elmos推出新一代多功能非接触式手势识别方案演示板