超构表面增强激光雷达,提升大视场和多区域成像能力
2022-10-11 10:48:43 来源:麦姆斯咨询 评论:0 点击:
法国蔚蓝海岸大学提出了一种替代的高频光束操纵方案,利用无源超构表面的光偏转能力,将激光雷达视场扩展到150° ×& 8201;150°,并能同时实现低分辨率和高分辨率多区域成像。
自动驾驶汽车和仓储机器人等自主运行系统包含了多种传感器,以获取关于周围环境的信息,用于实时确定其位置、速度和加速度。其中,测距传感器,尤其是光学测距传感器,为机器人系统提供了视觉能力,成为工业过程自动化的核心,即所谓的“4.0工业”革命。目前,已有多种光学成像技术集成进入工业机器人用于3D图像信息采集,例如多目立体视觉相机、雷达、结构光相机以及激光雷达(LiDAR)等。激光雷达这一技术概念起源于上个世纪60年代初,美国麻省理工学院(MIT)的科学家报道了向月球表面发送光辐射并检测回波信号以进行测距的方法。
基于麻省理工学院的开创性工作,激光雷达的研究一直利用激光源照射目标物体或场景,然后收集回波信号,从而重建高分辨率三维(3D)图像。传统的激光雷达利用了飞行时间(ToF)测量原理,即向远处反射物体发射激光脉冲,然后测量从激光传输到扫描场景并返回到检测模块的往返时间。激光雷达所有组件必须同步工作,以标记返回脉冲,用于测距成像重建。
要实现大范围空间感知,激光雷达光源必须能够对大视场(FoV)进行扫描。然后,通过测量每个方向的飞行时间,逐点检测场景中的对象,以构建光学回波图。调幅连续波(AMCW)、调频连续波(FMCW)或步进频率连续波(SFCW)等其他测量原理采用恒定或时间调制频率的连续波来测量调制光信息的往返时间。
激光雷达系统能够对远、中、近距离的物体或场景进行实时3D测量,在机器人视觉以外还有很多应用,例如地理测绘、大气颗粒物探测、风速测量、静态和/或移动物体跟踪以及增强现实/虚拟现实(AR/VR)等。通常,根据光源是同时照射场景还是扫描场景,激光雷达可以分为非扫描式(例如Flash激光雷达)或扫描式系统。
扫描式激光雷达系统通常包含三个关键组件:(i)光源,(ii)光束操纵扫描模块,以及(iii)探测系统,以高速重建从场景中接收到的光学信息。过去几十年来,基于纳米光子学的激光雷达系统蓬勃发展,提出了更先进的扫描和探测技术。预计激光雷达将在汽车行业大规模用于高级驾驶辅助系统(ADAS),以及全自动驾驶,这为其光速操纵扫描系统提出了新挑战,包括低制造复杂性、规模制造、成本、重量、耐振动等。
目前,工业应用的激光雷达主要采用宏观机械系统扫描整个360°视场。除了视场大以外,这类体积庞大的系统成像速度有限,只有几十赫兹。对于宏观机械式光束扫描,MEMS光束操纵方案是有前景的发展方向,它可以将扫描频率提升至kHz范围。然而,MEMS光束操纵方案的一个主要缺点是视场小,通常水平扫描不超过25°,垂直扫描不超过15°。
而在研究层面,采用光学相控阵(OPA)方案的光束操纵可以提供卓越的扫描速度,以及60°左右的视场。不过,由于其制造方面的挑战,OPA方案在不远的将来还不太可能在工业级系统中大规模部署。工业上成熟的液晶调制器也不足以作为激光雷达扫描仪,因为其视场角较差,通常低于20°,具体取决于波长及其调制频率。此外,声光偏转器(AOD)能够实现超快扫描(MHz),但在激光雷达领域从未被考虑过,因为其视场角太窄,最大只有2°,必须要在高速成像和大视场之间权衡。
过去十年来,超构表面(Metasurface)凭借任意调控光特性(即振幅、相位、频率和/或偏振)的潜力,吸引了全球光子学界的高度关注。超构表面是由亚波长大小和周期性散射物体(超构原子)排列而成的平面光学元件。目前,有四种光调制机制用于构建超构表面:谐振纳米颗粒的光散射、极化转换中出现的几何相位(Pancharatnam-Berry相位超构表面)、具有可控有效折射率(ERI)柱中的累积传播相位以及奇点附近的拓扑相位。
通常,超构表面包含固有无源元件,旨在制造后执行固定光学功能。例如,通过正确选择超构原子的大小和间距,超构表面能够以广义斯奈尔定律规定的任意但固定的角度重新定向激光束。显然,仅无源超构表面无法用于需要实时光束操纵的激光雷达。因此,具有外部激发可调谐光学特性的材料设计或与之结合的动态超构表面,有望成为实时光束操纵的理想替代方案。
美国初创公司LUMOTIVE推出了基于其液晶超构表面专利的革命性光束操纵技术,提供了前所未有的探测范围、分辨率及帧速率的高性能组合。该方案证明可以构建小型化、可扩展的激光雷达,但它涉及复杂的电子架构,并且对于金属超构表面构建模块,可能会出现严重的光学损耗。
据麦姆斯咨询介绍,法国蔚蓝海岸大学(Université Cote d’Azur)的一支研究团队提出了一种替代的高频光束操纵方案,利用无源超构表面的光偏转能力,将激光雷达视场扩展到150° × 150°,并能同时实现低分辨率和高分辨率多区域成像。研究人员采用与商用AOD级联的ERI多光束偏转超构表面。该系统在光束扫描性能、工作波长和材料方面具有很大的灵活性。
角分辨率是指系统区分相邻目标及检索形状的能力,对于需要同时进行远距离和近距离探测的应用非常重要。研究人员开发的多区域激光雷达成像系统可以通过高帧速率同时采集具有不同空间分辨率的高场和低场区域来模拟人类视觉。超构表面极高的设计灵活性为激光雷达系统提供了极具前景的成像能力,有望开辟新的工业应用。
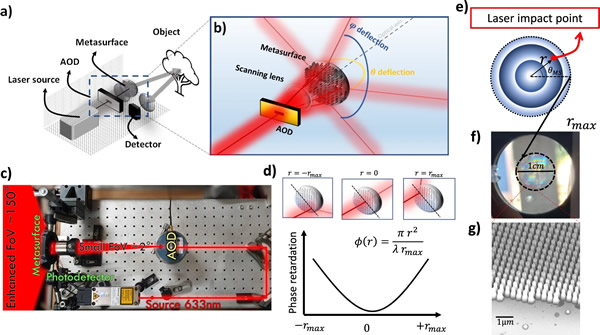
超构表面增强视场激光雷达概念设计
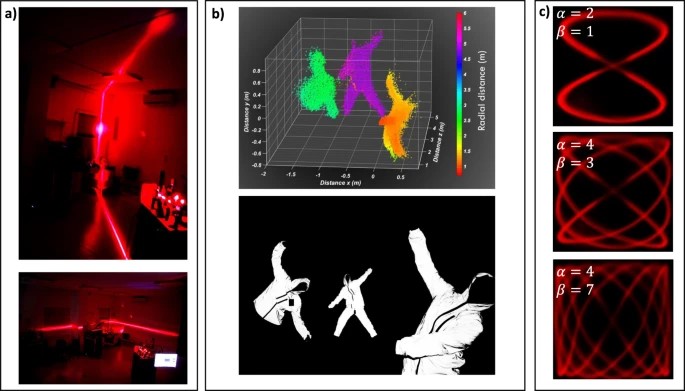
3D成像及广角扫描性能
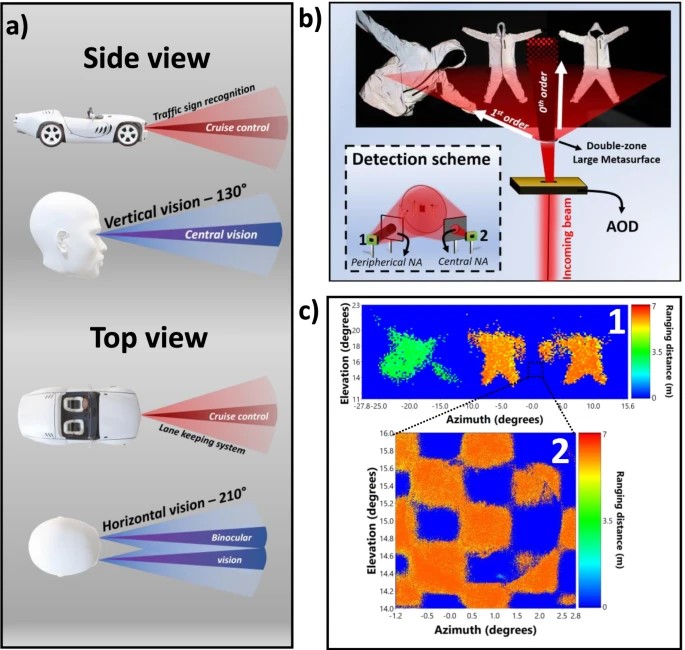
模拟人类视觉的多区域成像
该方案还提供了随机访问光束控制功能。超构表面在波前工程中的多功能性可以提高同时定位和测绘算法的能力。将该系统集成到ADAS中,可以为中/远距离感知提供颠覆性解决方案,其中,中央视图探测前方行车场景,而周边视图可以为行人安全提供额外的感知。
研究人员最后演示了实时成像的时间事件序列(>1k fps,1D扫描帧速率高达MHz)。该系统展示了优于现有激光雷达技术的性能,能够大幅减少机器人和ADAS系统的决策延时,面向未来应用极具前景。
延伸阅读:
上一篇:基于人工神经网络的全集成模拟CMOS认知图像传感器,可实现低分辨率图像分类
下一篇:基于超构表面的结构光3D成像投射技术,实现180°极限视场