用于从微观到宏观运动操控的压电机械手
2023-02-05 15:43:21 来源:麦姆斯咨询 评论:0 点击:
该压电机械手具有四个压电手指以及十二个运动自由度,在构建多自由度超精密操控系统方面前景广阔,研究人员利用该机械手开发了一套集成系统实现了多种应用。该研究为开发具有从微观到宏观尺度的多自由度运动操控的机械手提供了新方向。
据麦姆斯咨询报道,近期,哈尔滨工业大学机器人技术与系统国家重点实验室刘英想教授团队创新性地提出一种基于功能性压电陶瓷的直接驱动刚性压电机械手(PRH)。该压电机械手具有四个压电手指以及十二个运动自由度,在构建多自由度超精密操控系统方面前景广阔,研究人员利用该机械手开发了一套集成系统实现了多种应用。该研究为开发具有从微观到宏观尺度的多自由度运动操控的机械手提供了新方向。相关研究成果已发表于Nature Communications期刊。
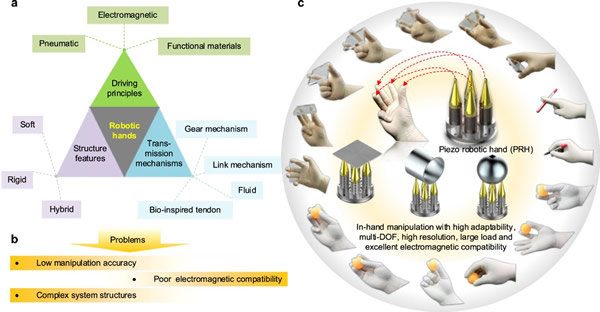
现有机械手的分类和面临的问题,以及本研究提出的受手部运动操控启发的压电机械手
机器人系统的不断增长推动了一些先进技术领域的快速发展,包括生物医学工程、临床外科、半导体制造、微/纳米定位和操控等。与此同时,对各种物体的多自由度运动操控已成为机器人系统的一项关键技能。机械手通常被用作机器人系统的执行端,其功能和性能决定了整个机器人系统的服务能力。
现有的机械手根据其结构特点、驱动原理和传动机制差异,可分为几种代表类型。根据结构特点,主要分为柔性机械手、刚性机械手和混合机械手。根据驱动原理,主要分为电磁机械手、气动机械手和功能材料机械手。此外,现有机械手通常利用几种典型的传动机构来转换运动、力或扭矩,主要包括齿轮机构、连杆机构、仿生肌腱和流体介质驱动方案。不过,由于结构、原理和驱动等方面的限制,现有机械手存在操控精度低、电磁兼容性差、系统复杂等问题,限制了其在运动操控领域的应用。因此,找到具有其他能量转换原理和优异电磁兼容性的新型驱动模式是当前面临的挑战。同时,设计更高效、更精确的传动机构或完全放弃传动机构,是开发机械手的重要设计思路。此外,机械手需要实现快速响应、输出力大、多自由度、高适应性,以满足先进技术应用的需求。
为解决现有机械手发展面临的问题,在该研究工作中,刘英想教授团队创新性地提出一种受手部运动操控启发的独特直接驱动刚性压电机械手。该研究的创新点和贡献主要包括:(1)提出了首个在压电陶瓷上构建的四指机械手,实现了手部多自由度操控,具有15 nm的高分辨率,0.5 ms的快速响应,3.95%的低迟滞,并且无电磁干扰。(2)该机械手采用独特的刚性结构,设有四个螺栓夹紧的金属陶瓷夹层压电手指,由于没有传动机构和铰链,结构紧凑、负载能力大。(3)该机械手通过四指协同操作,实现了从压电陶瓷微观变形到各种物体宏观运动的动作扩展,实现了多自由度和跨尺度的运动操控。(4)该机械手具有极佳的适应性,可操控各种不同形状、材料和尺寸的物体。一系列实验表明其在构建多自由度操控系统和执行抓取操控方面具有巨大的应用潜力。相关研究发现和结果成功地证明了采用压电陶瓷而放弃传动机构的新型驱动方式的可行性和优越性。
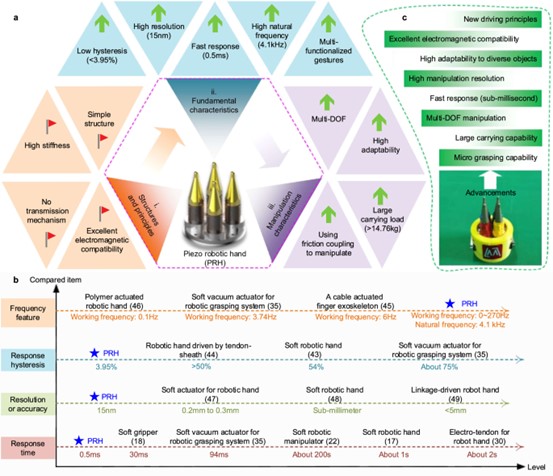
a)压电机械手的结构及设计原则、基本特征、操控特性;b)压电机械手与其他机械手的定量特性对比;c)与其他机械手相比,压电机械手的优势

基于压电机械手的各种物体操控实验以及应用场景
刘英想教授团队称,在这项工作中,研究人员仅研究了指尖的操控动作。实际上,指尖的侧面也可以用来操控其他物体,还可以在指尖上安装特定的操控工具来实现操控。为了将来更好地应用该科研成果,研究人员将继续深入研究,主要方向包括并不限于:(1)探索更有效的操控机制来操控不同物体,以拓宽操控能力;(2)利用该机械手整合构建机器人辅助操控系统;(3)建立运动检测方法并面向特定应用开展研究;(4)寻找有效的控制策略以改善操控性能。
论文链接:https://doi.org/10.1038/s41467-023-36243-3
延伸阅读:
上一篇:与皮肤高度集成的可拉伸执行器,用于触觉反馈和闭环人机交互
下一篇:MEMS时钟器件优势显著,在高超音速系统中替代传统石英时钟器件